一、概况
关于STM32WBA55CG开发板想必大家都比较熟悉了,开发板由核心板+扩展底板组成,支持多种无线协议。

开发板的特征如下:
二、开箱与环境搭建
拿到板子后,咱们将核心板与扩展底板拆开来看看。

板子布局设计紧凑,扩展出的引脚也比较多,可尽可能得满足客户外设的需求。这样布局设计可有效防止核心板与扩展底板管脚位对接发生错误,这点是非常值得肯定的。
由于板上支持STLINK-V3调试,因此无需外接其它下载调试器。关于开发环境搭建,首先我们通过STM32CubeWBA获得关于该板卡的软件开发工具包,如果采用之前旧版本的STM32CubeMX可能不支持STM32WBA55CG,需要重新下载安装。笔者这里使用的CubeMX版本是V6.13.0,软件工程包可手动下载“en.stm32cubewba-v1-5-0.zip”,当然使用STM32CubeMX设计时,联网后工具会后台自动帮我们下载关于该板卡的Repository数据包,默认保存到C盘个人名下的STM32Cube文件夹下。
笔者习惯于使用MDK开发,因此需要安装该板基于MDK的板间支持包,用户可通过STM32WBAxx_DFP链接获取到v1.3.0版本的支持包,手动傻瓜式安装即可,这里就不再赘述。
然后参考STM32Cube_FW_WBA_V1.5.0工程包中的Examples,加入点灯代码,编译,轻松实现闪灯功能。

三、工具配置
打开STM32CubeMX工具后,通过选择以官方板卡为创建入口,开始工程的创建。

选择不带TrustZone技术功能的工程,创建全新干净的工程。


然后我们将PA6\PA7\PA8\PB12做为四路PWM输出接口,选择TIM2,并设置好相对应的管脚配置。


四、代码编辑
将上述导出的MDK工程采用Keil V5.38.0打开,稍加一些逻辑处理代码,实现四路PWM呼吸灯效输出占空比。
main.c
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/*******************************************************************************
* Prototypes
******************************************************************************/
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
/* USER CODE BEGIN PV */
uint8_t dutyCycle = 0;
uint8_t var = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ICACHE_Init(void);
static void MX_TIM2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void Pwm_Change(void)
{
if(var == 0)
{
dutyCycle+=10;
}
else if(var == 1)
{
dutyCycle-=10;
}
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1, dutyCycle);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_2, dutyCycle);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_3, dutyCycle);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4, dutyCycle);
HAL_Delay(40);
if(dutyCycle >= 100)
var = 1;
else if(dutyCycle == 0)
var = 0;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ICACHE_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
/* Start channel 1 */
if (HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1) != HAL_OK)
{
/* PWM Generation Error */
Error_Handler();
}
/* Start channel 2 */
if (HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2) != HAL_OK)
{
/* PWM Generation Error */
Error_Handler();
}
/* Start channel 3 */
if (HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3) != HAL_OK)
{
/* PWM generation Error */
Error_Handler();
}
/* Start channel 4 */
if (HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4) != HAL_OK)
{
/* PWM generation Error */
Error_Handler();
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
Pwm_Change();
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEDiv = RCC_HSE_DIV1;
RCC_OscInitStruct.PLL1.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL1.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL1.PLLM = 4;
RCC_OscInitStruct.PLL1.PLLN = 25;
RCC_OscInitStruct.PLL1.PLLP = 2;
RCC_OscInitStruct.PLL1.PLLQ = 2;
RCC_OscInitStruct.PLL1.PLLR = 2;
RCC_OscInitStruct.PLL1.PLLFractional = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_PCLK7|RCC_CLOCKTYPE_HCLK5;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB7CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.AHB5_PLL1_CLKDivider = RCC_SYSCLK_PLL1_DIV4;
RCC_ClkInitStruct.AHB5_HSEHSI_CLKDivider = RCC_SYSCLK_HSEHSI_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief ICACHE Initialization Function
* @param None
* @retval None
*/
static void MX_ICACHE_Init(void)
{
/* USER CODE BEGIN ICACHE_Init 0 */
/* USER CODE END ICACHE_Init 0 */
/* USER CODE BEGIN ICACHE_Init 1 */
/* USER CODE END ICACHE_Init 1 */
/** Enable instruction cache in 1-way (direct mapped cache)
*/
if (HAL_ICACHE_ConfigAssociativityMode(ICACHE_1WAY) != HAL_OK)
{
Error_Handler();
}
if (HAL_ICACHE_Enable() != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ICACHE_Init 2 */
/* USER CODE END ICACHE_Init 2 */
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = Prescaler_Value;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 50;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sConfigOC.Pulse = 50;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
sConfigOC.Pulse = 50;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
sConfigOC.Pulse = 50;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
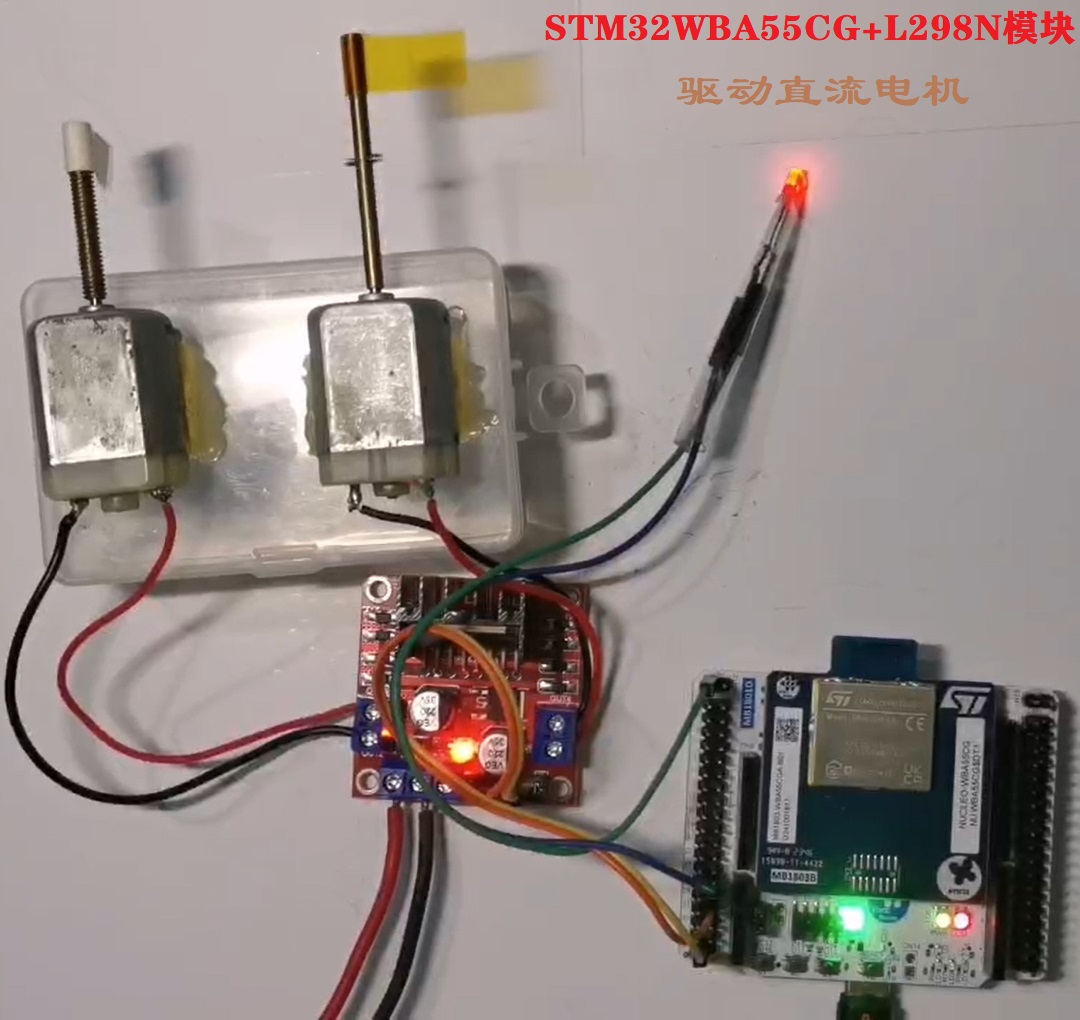
五、硬件连线
根据用户手册,板上的IO管脚分布图可知这些管脚的位置。


正如上图所示,这里的外接LED正极管脚连接PA7,PA6连接L298N模块的IN1输入通道,PB12连接L298N模块的IN4输入通道,将编译后的程序下载到开发板中后运行,可观察到红色指示灯以呼吸灯模式点亮,而L298N电机模块的两组直流电机转速则截然不同,方向相反,转速递增递减也不尽相同。
六、实验效果
直流电机与指示灯呈现效果见如下视频。目前还在琢磨为啥两组电机输出的转速不一致问题?需要排查电机硬件结构因素,两个电机均支持12V供电,但具体型号、轴心不一致。电机转动的噪声与呼吸灯亮度变化同步。


 微信公众号
微信公众号
 手机版
手机版