基础了解
时钟选择计数器时钟可由下列时钟源提供:
● 内部时钟(CK_INT)
● 外部时钟模式1:外部输入脚(TIx)
● 外部时钟模式2:外部触发输入(ETR)
● 内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器
在平常使用中我们系统复位 000 默认使用内部时钟源
内部时钟源
从时钟选择框图中可以看到,内部时钟源(CK_INT)来自RCC的TIMx_CLK,即定时器本身的驱动时钟。
当禁止从模式控制器(TIMx_SMCR寄存器的SMS=000),则预分频的时钟源CK_PSC由内部时钟源(CK_INT)驱动。定时器的实际控制位为CEN位、DIR位和UG位,并且只能被软件修改(UG位仍被自动清除)。只要CEN位被置1,预分频器的时钟CK_PSC就由内部时钟CK_INT提供。
通用定时器的内部时钟来源于APB1总线时钟,但是通用定时器的内部时钟是根据APB1总线时钟是否分频来决定的,如果APB1总线时钟预分频系数为1,则通用定时器的内部时钟就是APB1总线时钟;但是如果APB1总线时钟的分频系数为2,则通用定时器的内部时钟就是APB1总线时钟的2倍。
下图显示了控制电路和向上计数器在一般模式下,不带预分频器时(分频系数为0)的操作。
如图所示,只有当CEN位被置位高电平的时候,预分频器的时钟CK_PSC和计数器的时钟CK_CNT才开始工作。
外部时钟源1
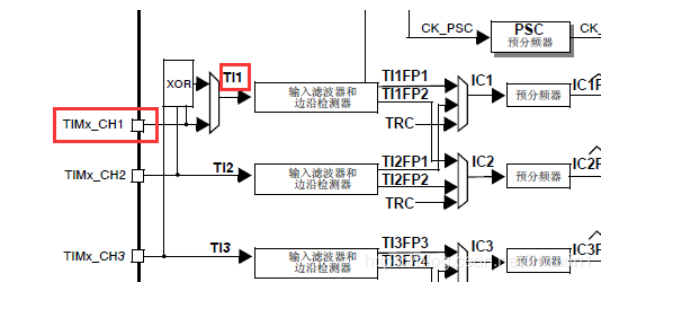
来自定时器自身输入通道1或通道2的输入信号,经过极性选择和滤波以后生成的触发信号,连接到从模式控制器,进而控制计数器的工作;
来自通道1的输入信号经过上升沿、下降沿双沿检测而生成的脉冲信号进行逻辑相或以后的信号就是TI1F_ED信号,即TI1F_ED双沿脉冲信号。
相关函数
TIM_TIxExternalClockConfig(TIM2, TIM_TS_TI1FP1,TIM_ICPolarity_Rising, 0);
//设置 TIMx 触发为外部时钟(从四个通道引脚引入)
//触发源选择:
//TIM_TIxExternalCLK1Source_TI1ED: 双边沿的Timer Input 1
//TIM_TIxExternalCLK1Source_TI1: 滤波后的Timer Input 1
//TIM_TIxExternalCLK1Source_TI2: 滤波后Timer Input 2
//设置输入捕获的边沿:
//TIM_ICPolarity_Rising
//TIM_ICPolarity_Falling
//TIM_ICPolarity_BothEdge
//设置滤波设置:
//必须在0x0与0xF之间
代码示例
时钟源对频率进行计数
- #include "timer.h"
- #include "led.h"
- //
- //将PB5与tim2-ch1的pa0短接
- pb5为时钟源对频率进行计数
- void TIM2_Int_Init( u16 arr,u16 psc ){
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
- GPIO_InitStructure.GPIO_Mode =
- GPIO_Mode_IN_FLOATING;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
- TIM_DeInit(TIM2);
- TIM_TimeBaseStructure.TIM_Period = arr;
- TIM_TimeBaseStructure.TIM_Prescaler =psc;
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
- TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE );
- /*重点*/
- TIM_TIxExternalClockConfig(TIM2,TIM_TIxExternalCLK1Source_TI1,TIM_ICPolarity_Falling,15);//设置输入滤波和边沿检测
- TIM_Cmd(TIM2, ENABLE);
- //
- }
- void TIM3_Int_Init(u16 arr,u16 psc){
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
- TIM_TimeBaseStructure.TIM_Period = arr;
- TIM_TimeBaseStructure.TIM_Prescaler = psc;
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
- TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE );
- NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
- TIM_Cmd(TIM3, ENABLE);
- }
- void TIM3_IRQHandler(void){
- if (TIM_GetITStatus(TIM3, TIM_IT_Update)!=RESET){
- LED0=!LED0;
- }
- TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
- }
- #include "led.h"
- #include "delay.h"
- #include "key.h"
- #include "sys.h"
- #include "usart.h"
- #include "timer.h"
- int main(void)
- {
- delay_init(); //延时函数初始化
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
- uart_init(115200); //串口初始化为115200
- LED_Init(); //LED端口初始化
- TIM3_Int_Init(4999,7199);//10Khz的计数频率,计数到5000为500ms
- TIM2_Int_Init(10,0);
-
- while(1)
- {
- //LED0=!LED0;
- delay_ms(400);
- printf("Count=%d\n",TIM_GetCounter(TIM2));
- }
-
- }
//TIM_TIxExternalCLK1Source_TI2: 滤波后Timer Input 2
这两个选项T1是CH1通道 T2经测试CH1与CH2通用
大概是这个异或的原因
外部时钟源模式2
来自于 外部触发脚[ETR脚] 经过极性选择、分频、滤波以后的信号,经过触发输入选择器,连接到从模式控制器。当然分频和滤波不是必需的,可以根据外来信号频率高低及信号干净度来决定。
ETR功能较全可以完成T1的工作但仅限于CH1通道,可以经行分频
相关函数
TIM_ITRxExternalClockConfig(TIM2, TIM_TS_ITR3);
//设置定时器工作于从模式,时钟源为其他定时器的输出分频.此时钟源无滤波
//TIM_TS_ITR0 TIM内部触发0 TIM1
//TIM_TS_ITR1 TIM内部触发1 TIM2
//TIM_TS_ITR2 TIM内部触发2 TIM3
//TIM_TS_ITR3 TIM内部触发3 TIM4
TIM_TS_TI1F_ED
TIM_TS_TI1FP1
TIM_TS_TI2FP2
TIM_TS_ETRF
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_DIV2,TIM_ExtTRGPolarity_NonInverted, 0x0);
//外部时钟模式1.需要设置预分频,以及外部触发极性:滤波
//TIM_ExtTRGPolarity_Inverted TIM外部触发极性翻转: 低电平或下降沿有效 //TIM_ExtTRGPolarity_NonInverted TIM外部触发极性非翻转:高电平或上升沿有效
代码示例
由第一个示例更改,功能一致main不变
- void TIM2_Int_Init( u16 arr,u16 psc ){
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
- TIM_DeInit(TIM2);
- TIM_TimeBaseStructure.TIM_Period = arr;
- TIM_TimeBaseStructure.TIM_Prescaler =psc;
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
- TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE );
- /*重点*/
- TIM_ITRxExternalClockConfig(TIM2,TIM_TS_ITR3);//高级定时器开启
- TIM_ETRClockMode2Config(TIM2,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_NonInverted,0)//配置外部时钟2的模式;
- TIM_SetCounter( TIM2,0 );
- /
-
- TIM_Cmd(TIM2, ENABLE);
- }
- void TIM2_IRQHandler(void){
- if (TIM_GetITStatus(TIM2, TIM_IT_Update)!= RESET){
- }
- TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
- }
|
 STMCU-管管
发布时间:2021-6-4 10:11
STMCU-管管
发布时间:2021-6-4 10:11






 微信公众号
微信公众号
 手机版
手机版