.png) STMCU小助手
发布时间:2022-3-8 22:28
STMCU小助手
发布时间:2022-3-8 22:28
|
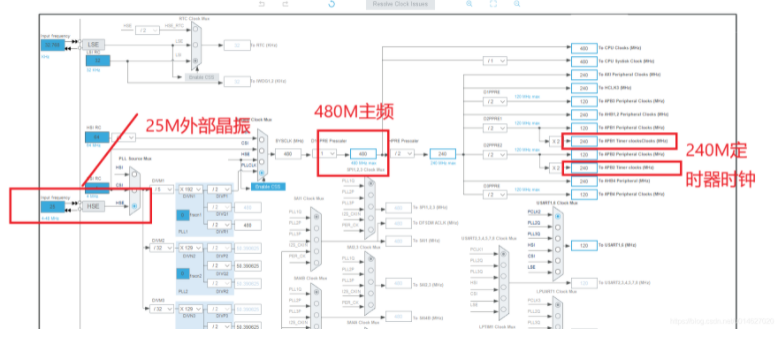
一、SG90角度与PWM转换关系 舵机参数:f=50hz,t=20ms 根据选用的SG90参数,我们需要给出周期为20ms,其中高电平时间为 0.5ms-2.5ms的信号 0.5ms-------------0度; 2.5% 1.0ms------------45度; 5.0% 1.5ms------------90度; 7.5% 2.0ms-----------135度; 10.0% 2.5ms-----------180度; 12.5% 二、Cubemx参数配置 1、时钟配置 
2、定时器配置PWM输出设置 根据SG90的参数,我们需要设置PWM输出一个周期时间为20ms,初始值为0.5ms高电平的信号。 计算方法:Timer定时器时钟我们设置为240Mhz,这里我们将预分频设置为239,则一个周期为240Mhz/(239+1)=1Mhz(即1us),所以20ms的周期我们需要计数20000-1=19999个填入Counter Period参数中。 另外,我们还需要一个默认脉冲宽度为0.5ms的,0.5/20*20000=500 其他设置如下图所示: ![I1]{OF37[}{NHU]LNCB8SB5.png](data/attachment/forum/202203/08/222839c471zzmoh1a1w3z4.png "I1]{OF37[}{NHU]LNCB8SB5.png")
三、MDK代码修改与运行 1.PWM与SG90转换角度转换函数 方便实验我们将所需要的角度与PWM计数值对应关系封装成一个函数。只需要输入我们所需要的角度和相关定时器参数即可。 代码如下(示例):
2.实验现象 这里在主函数增加了按键扫描通过按键控制SG90正反转180°。 另外还增加了串口printf函数,打印SG90旋转时的角度变化。 代码如下(示例):
可以看到按键按下SG90按照我们预期的动作变化。实验成功。 ![M1G6TQ3@8{[@Q64aW22]0.png](data/attachment/forum/202203/08/222840ksv0mz04043rb6bz.png "M1G6TQ3@8{[@Q64aW22]0.png")
|
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版