STM32 输出方波的方法有两种比较类似的,一个是PWM模式,一个是输出比较模式。下面来看看这两种模式的不同处在哪。
先看看官方对两种模式的介绍
PWM模式:
![V30DM{2]NF%PD5A}0HKMHXG.png](data/attachment/forum/202203/21/133331otguutuo000otl26.png "V30DM{2]NF%PD5A}0HKMHXG.png")
输出比较模式

Q%7~~DOLMX.png")
通过两种模式的介绍,好像不能直观的看出来具体差别在哪,再看看两种模式设置时寄存器里面的介绍。
![YA3$G]KQJA~[LV]XQSS$RRC.png](data/attachment/forum/202203/21/133331fsgsgzmf0gq6irtn.png "YA3$G]KQJA~[LV]XQSS$RRC.png")
通过CCMR寄存器中的OCM位可以看出来这两种模式的一点区别。
输出比较模式下: CCR = CNT 时,翻转输出电平。
PWM模式下: CNT < CCR时输出一种电平,CNT > CCR时输出相反的电平。
通过图片来直观的看看这两种模式的区别。
)Y2[NVH7_9QF0.png")
PWM模式下: ARR 决定输出频率 ,CCR决定输出占空比。
![9R@UP408E2U4A%Y]$PVP`2G.png](data/attachment/forum/202203/21/133332amqtguztwmj1314m.png "9R@UP408E2U4A%Y]$PVP`2G.png")
输出比较模式下: ARR 决定输出频率 CCRx 决定每个通道的初始相位。
两种模式下最主要的差别就是CCR值代表的含义不一样。PWM模式下CCR可以控制占空比。输出比较模式下CCR可以控制初始相位。
下面通过一个程序来对比一下这两种模式
- #include "pwm.h"
- void TIM3_PWM_Init( u16 arr, u16 psc )
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
- RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM3, ENABLE ); //使能定时器3时钟
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE ); //使能GPIO和AFIO复用功能模块时钟
- //设置TIM3 CH3
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init( GPIOB, &GPIO_InitStructure );
- //初始化TIM3
- TIM_TimeBaseInitStructure.TIM_Period = arr;
- TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit( TIM3, &TIM_TimeBaseInitStructure );
- //初始化TIM3_CH3 PWM 模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
- TIM_OC3Init( TIM3, &TIM_OCInitStructure );
- //使能TIM3在CCR2上的预装载寄存器
- TIM_OC3PreloadConfig( TIM3, TIM_OCPreload_Enable );
- //使能TIM3
- TIM_Cmd( TIM3, ENABLE );
- }
- void TIM3_CMP_Init( u16 arr, u16 psc )
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
- RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM3, ENABLE ); //使能定时器3时钟
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB , ENABLE ); //使能GPIOC时钟
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- //初始化TIM3
- TIM_TimeBaseInitStructure.TIM_Period = arr;
- TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit( TIM3, &TIM_TimeBaseInitStructure );
- //初始化TIM3_CH4 比较 模式 输出比较翻转触发模式(当计数值与比较/捕获寄存器值相同时,翻转输出引脚的电平)
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
-
- TIM_OC4Init( TIM3, &TIM_OCInitStructure );
- TIM_OC4PreloadConfig( TIM3, TIM_OCPreload_Enable );
- //使能TIM3
- TIM_Cmd( TIM3, ENABLE );
- }
将定时器3通道3设置为PWM输出模式,定时器3通道4设置为输出比较模式。
- #include "sys.h"
- #include "delay.h"
- #include "usart.h"
- #include "led.h"
- #include "pwm.h"
- // LED0 PA8 LED1 PD2
- int main(void)
- {
- u16 led_pwm_val=0;
- u8 dir=1;
- delay_init(); //延时函数初始化
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- LED_Init();
- LED0 = 1;
- LED1 = 1;
- delay_ms(500);
- LED0 = 0;
- LED1 = 0;
- //比较输出模式下: ARR 决定输出频率 CCRx 决定每个通道的初始相位
- //PWM模式: ARR 决定输出频率 CCRx 决定输出 的高电平时长
- TIM3_PWM_Init(1000-1,72-1);
-
- //比较翻转模式,一个周期只翻转一次,所以频率为 1/2
- TIM3_CMP_Init(1000-1,71-1);
- TIM_SetCompare3(TIM3,100); //PWM 模式
- TIM_SetCompare4(TIM3,100); //比较输出模式
- while(1)
- {
- delay_ms(200);
- LED0 = !LED0;
- }
- }
主函数中分别初始化两种模式,然后设置CCR值为相同值,看看输出波形的区别。

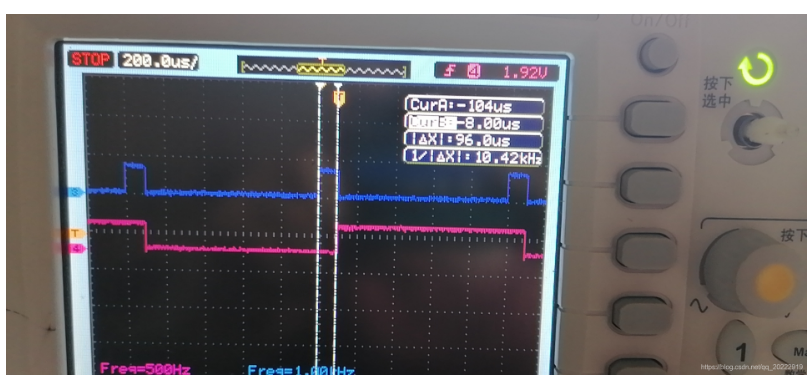
蓝色波形为 PWM模式输出的波形,粉色为输出比较模式输出的波形。可以看到同样的设置参数,PWM输出方波频率为1KHz,输出比较输出的方波为500Hz,说明输出比较模式的频率为PWM模式频率的1/2。

PWM输出波形的高电平为100us,周期为1000us,占空比为10%,和主函数中设置的一样。
输出比较模式输出的波形起始相位滞后于PWM波形100us,滞后相位差为PWM波形的10%,滞后相位差为本身输出波形的20%。
输出比较模式的占空比为50%,是固定的不能修改占空比。
通过上面实验可以看到,这两种模式的主要差别是。
PWM模式: ARR设置频率,CCR设置占空比,频率和占空比可以任意设置,起始相位不能设置。
输出比较模式:ARR设置频率,CCR设置相位,频率和起始相位可以任意设置,占空比不能设置。输出频率为理论计算值一半。
|
.png) STMCU小助手
发布时间:2022-3-22 13:00
STMCU小助手
发布时间:2022-3-22 13:00
 微信公众号
微信公众号
 手机版
手机版