.png) STMCU小助手
发布时间:2022-3-23 14:00
STMCU小助手
发布时间:2022-3-23 14:00
|
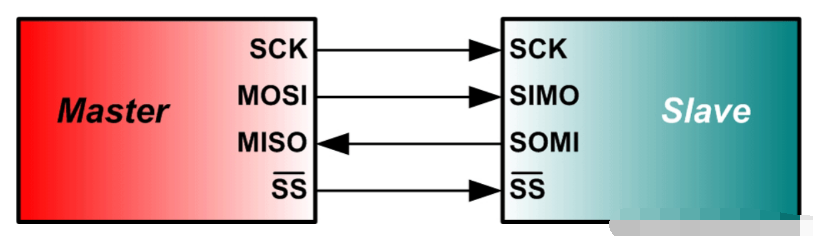
在我们的HAL库中,对硬件SPI函数做了很好的集成,使得之前SPI几百行代码,在HAL库中,只需要寥寥几行就可以完成 那么这篇文章将带你去感受下它的优异之处,这些优异的函数,也正是HAL库的优点所在 所用工具: 1、芯片: STM32F103ZET6 2、STM32CubeMx软件 3、IDE: MDK-Keil软件 4、STM32F1xx/STM32F4xxHAL库 5、SPI: 使用硬件SPI1 知识概括: 通过本篇博客您将学到: SPI的基本原理 STM32CubeMX创建SPI例程 HAL库SPI函数库 什么是SPI SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola(摩托罗拉)首先在其MC68HCXX系列处理器上定义的。 SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。 SPI主从模式 SPI分为主、从两种模式,一个SPI通讯系统需要包含一个(且只能是一个)主设备,一个或多个从设备。提供时钟的为主设备(Master),接收时钟的设备为从设备(Slave),SPI接口的读写操作,都是由主设备发起。当存在多个从设备时,通过各自的片选信号进行管理。 SPI是全双工且SPI没有定义速度限制,一般的实现通常能达到甚至超过10 Mbps SPI信号线 SPI接口一般使用四条信号线通信: SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选) MISO: 主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。 MOSI: 主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。 SCLK:串行时钟信号,由主设备产生。 CS/SS:从设备片选信号,由主设备控制。它的功能是用来作为“片选引脚”,也就是选择指定的从设备,让主设备可以单独地与特定从设备通讯,避免数据线上的冲突。 硬件上为4根线。 SPI一对一 ![U4AND{]Q35]1A2B[VX~{)$P.png](data/attachment/forum/202203/21/145847gldh8mlu0nppg4id.png "U4AND{]Q35]1A2B[VX~{)$P.png")
SPI一对多 ![~EU(]W4UD{ZK@3[0U}6[WT5.png](data/attachment/forum/202203/21/145848ast7olp7oa00woba.png "~EU(]W4UD{ZK@3[0U}6[WT5.png")
SPI数据发送接收 SPI主机和从机都有一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节来发起一次传输。 1.首先拉低对应SS信号线,表示与该设备进行通信 2.主机通过发送SCLK时钟信号,来告诉从机写数据或者读数据 这里要注意,SCLK时钟信号可能是低电平有效,也可能是高电平有效,因为SPI有四种模式,这个我们在下面会介绍 3.主机(Master)将要发送的数据写到发送数据缓存区(Menory),缓存区经过移位寄存器(0~7),串行移位寄存器通过MOSI信号线将字节一位一位的移出去传送给从机,,同时MISO接口接收到的数据经过移位寄存器一位一位的移到接收缓存区。 4.从机(Slave)也将自己的串行移位寄存器(0~7)中的内容通过MISO信号线返回给主机。同时通过MOSI信号线接收主机发送的数据,这样,两个移位寄存器中的内容就被交换。 
SPI只有主模式和从模式之分,没有读和写的说法,外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据。 SPI工作模式 根据时钟极性(CPOL)及相位(CPHA)不同,SPI有四种工作模式。 时钟极性(CPOL)定义了时钟空闲状态电平: CPOL=0为时钟空闲时为低电平 CPOL=1为时钟空闲时为高电平 时钟相位(CPHA)定义数据的采集时间。 CPHA=0:在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。 CPHA=1:在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。 
W25Q128 FLASH芯片介绍 W25Q128是一款SPI通信的FLASH芯片,可以通过标准/两线/四线SPI控制,其FLASH的大小为16M,分为 256 个块(Block),每个块大小为 64K 字节,每个块又分为 16个扇区(Sector),每个扇区 4K 个字节。通过SPI通信协议即可实现MCU(STM32)和 W25Q128 之间的通信。实现W25Q128的控制需要通过SPI协议发送相应的控制指令,并满足一定的时序。 原理图连接 ![S65UQWR]EZ(@1G2M{E3~IV2.png](data/attachment/forum/202203/21/145848l7ioekxh71rto1we.png "S65UQWR]EZ(@1G2M{E3~IV2.png")
常用指令: 写使能(Write Enable) (06h) )9_Z864R%SE.png")
向FLASH发送0x06 写使能命令即可开启写使能,首先CS片选拉低,控制写入字节函数写入命令,CS片选拉高。 扇区擦除指令(Sector Erase) (0x20h) 
扇区擦除指令,数据写入前必须擦除对应的存储单元,该指令先拉低/CS引脚电平,接着传输“20H”指令和要24位要擦除扇区的地址。 读命令(Read Data) (03h) 读数据指令可从存储器依次一个或多个数据字节,该指令通过主器件拉低/CS电平使能设备开始传输,然后传输“03H”指令,接着通过DI管脚传输24位地址,从器件接到地址后,寻址存储器中的数据通过DO引脚输出。每传输一个字节地址自动递增,所以只要时钟继续传输,可以不断读取存储器中的数据。 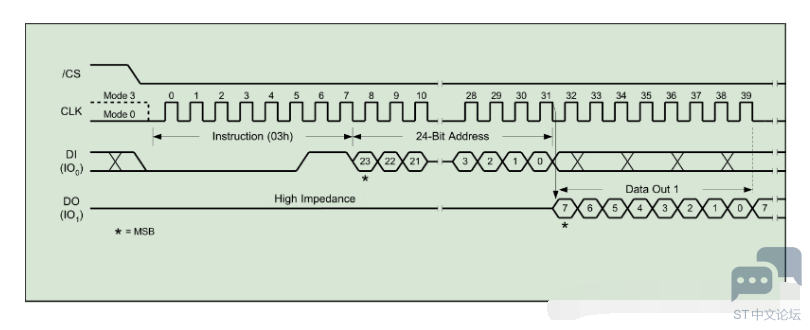
状态读取命令(Read Status Register) 读状态寄存器1(05H),状态寄存器2(35H),状态寄存器3(15H) 写入命令0x05,即可读取状态寄存器的值。 T(M80VV1S8J.png")
写入命令(Page Program) (02h) 
在对W25Q128 FLASH的写入数据的操作中一定要先擦出扇区,在进行写入,否则将会发生数据错误。 W25Q128 FLASH一次性最大写入只有256个字节。 在进行写操作之前,一定要开启写使能(Write Enable)。 当只接收数据时不但能只检测RXNE状态 ,必须同时向发送缓冲区发送数据才能驱动SCK时钟跳变。 基于CubeMx的讲解 1设置RCC时钟 ![A9XVC[L){CQYZLTRY6A]3~B.png](data/attachment/forum/202203/21/145850a5w55kjk2x02e2bn.png "A9XVC[L){CQYZLTRY6A]3~B.png")
设置高速外部时钟HSE 选择外部时钟源 2 SPI设置 SPI2设置为全双工主模式,硬件NSS关闭,如下图: BGBQ5P@`)0tLU.png")
B_EEMT$II8GC[19Y_K9K.png")
模式设置: 有主机模式全双工/半双工 从机模式全双工/半双工 只接收主机模式/只接收从机模式 只发送主机模式 因为我们是和W25Q128V芯片闪存芯片进行通信,所以设置为主机全双工 不使能硬件NSS 
STM32有硬件NSS(片选信号),可以选择使能,也可以使用其他IO口接到芯片的NSS上进行代替 其中SIP1的片选NSS : SPI1_NSS(PA4) 其中SIP2的片选NSS : SPI2_NSS(PB12) 如果片选引脚没有连接 SPI1_NSS(PA4)或者SPI2_NSS(PB12),则需要选择软件片选 NSS管脚及我们熟知的片选信号,作为主设备NSS管脚为高电平,从设备NSS管脚为低电平。当NSS管脚为低电平时,该spi设备被选中,可以和主设备进行通信。在stm32中,每个spi控制器的NSS信号引脚都具有两种功能,即输入和输出。所谓的输入就是NSS管脚的信号给自己。所谓的输出就是将NSS的信号送出去,给从机。 对于NSS的输入,又分为软件输入和硬件输入。 软件输入: NSS分为内部管脚和外部管脚,通过设置spi_cr1寄存器的ssm位和ssi位都为1可以设置NSS管脚为软件输入模式且内部管脚提供的电平为高电平,其中SSM位为使能软件输入位。SSI位为设置内部管脚电平位。同理通过设置SSM和SSI位1和0则此时的NSS管脚为软件输入模式但内部管脚提供的电平为0。若从设备是一个其他的带有spi接口的芯片,并不能选择NSS管脚的方式,则可以有两种办法,一种是将NSS管脚直接接低电平。另一种就是通过主设备的任何一个gpio口去输出低电平选中从设备。 硬件输入: 主机接高电平,从机接低电平。 左键对应的软件片选引脚,选择GPIO_Output(输出模式),然后点击GPIO,设置一下备注。 我这里虽然PB12是SPI2的硬件片选NSS,但是我想用软件片选,所以关闭了硬件NSS ![~%UZ[)HI6C((0BNCD{K(H]7.png](data/attachment/forum/202203/21/145850s2md9rrjmv2sa4o4.png "~%UZ[)HI6C((0BNCD{K(H]7.png")

SPI配置默认如下: SPI配置中设置数据长度为8bit,MSB先输出分频为64分频,则波特率为125KBits/s。其他为默认设置。 Motorla格式,CPOL设置为Low,CPHA设置为第一个边沿。不开启CRC检验,NSS为软件控制。 
最后记得初始化一下串口,因为需要测试例程,发送数据到上位机。 ![))_{$KKQG4]2X{X`R(XLEPT.png](data/attachment/forum/202203/21/145851x37j73ye7znhf88v.png "))_{$KKQG4]2X{X`R(XLEPT.png")
3时钟源设置 O[VF06P0JCU.png")
我的是 外部晶振为8MHz 1选择外部时钟HSE 8MHz 2PLL锁相环倍频9倍 3系统时钟来源选择为PLL 4设置APB1分频器为 /2 5 使能CSS监视时钟 32的时钟树框图 如果不懂的话请看《【STM32】系统时钟RCC详解(超详细,超全面)》 4项目文件设置 ![K[I448YQ}X]MOK]ZO1[6C.png](data/attachment/forum/202203/21/145852msof3c00s538orzz.png "K[I448YQ}X]MOK]ZO1[6C.png")
1 设置项目名称 2 设置存储路径 3 选择所用IDE ![GPR)1~0V)H[YO(A)U2I]`LF.png](data/attachment/forum/202203/21/145852pdvkiiz7xdcjvvjg.png "GPR)1~0V)H[YO(A)U2I]`LF.png")
5创建工程文件 然后点击GENERATE CODE 创建工程 配置下载工具 新建的工程所有配置都是默认的 我们需要自行选择下载模式,勾选上下载后复位运行 ![K)5%$]7K[06O]YRL~9QE)Y4.png](data/attachment/forum/202203/21/145852cknxnp9jz5n9f5zn.png "K)5%$]7K[06O]YRL~9QE)Y4.png")
SPI函数详解 在stm32f1xx_hal_spi.h头文件中可以看到spi的操作函数。分别对应轮询,中断和DMA三种控制方式。 
轮询: 最基本的发送接收函数,就是正常的发送数据和接收数据 中断: 在SPI发送或者接收完成的时候,会进入SPI回调函数,用户可以编写回调函数,实现设定功能 DMA: DMA传输SPI数据 利用SPI接口发送和接收数据主要调用以下两个函数:
SPI发送数据函数:
参数: *hspi: 选择SPI1/2,比如&hspi1,&hspi2 *pData : 需要发送的数据,可以为数组 Size: 发送数据的字节数,1 就是发送一个字节数据 Timeout: 超时时间,就是执行发送函数最长的时间,超过该时间自动退出发送函数 SPI接收数据函数:
参数: *hspi: 选择SPI1/2,比如&hspi1,&hspi2 *pData : 接收发送过来的数据的数组 Size: 接收数据的字节数,1 就是接收一个字节数据 Timeout: 超时时间,就是执行接收函数最长的时间,超过该时间自动退出接收函数 SPI接收回调函数:
当SPI上接收出现了 CommSize个字节的数据后,中断函数会调用SPI回调函数:
用户可以重新定义回调函数,编写预定功能即可,在接收完成之后便会进入回调函数 片选引脚: 因为我们是软件使能片选,定义片选引脚,CS片选低电平为有效使能, CS片选高电平不使能 这里用两个宏定义来代替 在main.h中有宏定义命名,SPI2_CS_Pin 就是PB12
SPI例程详解 因为不同的flash芯片通信协议以及方式都是不同的,所以这里介绍下具体的SPI的发送和接收应该怎么写,具体的请看芯片手册修改下即可,这里提供下W25QXX的驱动文件,以及测试例程,测试是正常没问题 挑几个函数讲解一下: 在w25Qxx.h钟可以修改CS片选引脚,W25Qx_Enable(),W25Qx_Disable()分别为使能和失能SPI设备,即拉低和拉高/CS电平
w25Qxx复位函数: 函数开始先将要发送的数据(命令(0x66)和地址(0x99))存储在cmd数组中, 拉低片选信号,开始SPI通信 然后后通过HAL_SPI_Transmit()函数发送出去 拉高片选信号,关闭SPI通信 W25Qx_TIMEOUT_VALUE是最大超时时间,在w25Qxx.h中定义为1000,单位为us ![FA)X9VQ]S3IY97FX]V8X1FW.png](data/attachment/forum/202203/21/145852izff7p97y0ff1liy.png "FA)X9VQ]S3IY97FX]V8X1FW.png")
W25QXX读函数: 三个参数: pData 存放读取到的数据的数组 ReadAddr 读取数据的地址 Size 读取数据的大小 … 函数开始先将要发送的数据(命令和地址)存储在cmd数组中, 拉低片选信号,开始SPI通信 然后后通过HAL_SPI_Transmit()函数发送出去,首先发送写命令(0X03),上方有讲解,然后发送三个字节(24 Bit)的地址 接着通过HAL_SPI_Receive()接收读取的数据。 拉高片选信号,关闭SPI通信 
写使能(Write Enable) (06h) 
向FLASH发送0x06 写使能命令即可开启写使能,首先CS片选拉低,控制写入字节函数写入命令,CS片选拉高。
扇区擦除函数: 扇区擦除指令(Sector Erase) (0x20h) 
扇区擦除指令,数据写入前必须擦除对应的存储单元,并且使能写操作,该指令先拉低/CS引脚电平,接着传输“20H”指令和要24位要擦除扇区的地址。判断flash是否为忙状态,如果不为忙则擦除操作完成。
例程测试 重新定义printf函数 在 stm32f1xx_hal.c中包含#include <stdio.h>
在 stm32f1xx_hal.c 中重写fget和fput函数
main.c 在main.c里添加以下代码:
STM32F103测试正常: 
|
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版