.png) STMCU小助手
发布时间:2022-4-7 11:17
STMCU小助手
发布时间:2022-4-7 11:17
|
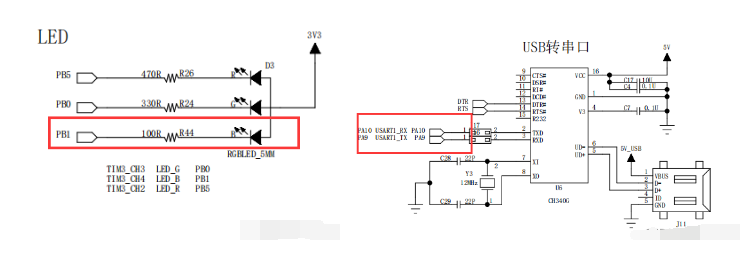
对于PWM的捕获,我这里一共使用两种方法实现:第一种是PWM输入模式,采用一个定时器的两个通道(通道一和通道二),配置从模式为复位模式,没有进行溢出处理,所以需要考虑捕获的最低频率;第二种是普通的输入捕获模式,采用一个定时器一个通道,有进行溢出处理,所以没有最低频率的限制。 实验内容:使用高级定时器输入捕获测量PWM的周期和占空比。 一、原理图 ![${TYGVYQ_QQZHC]VL}]I0JU.png](data/attachment/forum/202204/07/111747t6cehcz46celkuk4.png "${TYGVYQ_QQZHC]VL}]I0JU.png")
—— —— —— —— —— —— —— ——PWM输入模式—— —— —— —— —— —— —— —— 二、 CubeMX配置 Step1.打开 STM32CubeMX,点击“New Project”,选择芯片型号,STM32F103VETx。 ![{`R__9]OPC@S~9YN`V}WM{R.png](data/attachment/forum/202204/07/111747iwb4bsdtwpeedppl.png "{`R__9]OPC@S~9YN`V}WM{R.png")
Step2.选择时钟源,并配置时钟树。选择Crystal/Ceramic Resonator,并配置系统时钟为72M。 
![){8RU_68G[1(75AP]XK6B4P.png](data/attachment/forum/202204/07/111747l8jddd4e5ntzo58y.png "){8RU_68G[1(75AP]XK6B4P.png")
Step3.配置SYS,我们这里选择的是Serial Wire。(正常情况配置不配置不影响,debug可以使用。但是你不可以把这两个引脚用于其他复用功能,如果用于其他复用功能,debug就不起作用了。) ![2K(UN5~C8CH[4AF2$C_]~SM.png](data/attachment/forum/202204/07/111747bx3yn1byvn0shvt1.png "2K(UN5~C8CH[4AF2$C_]~SM.png")
Step4.串口配置(主要为了在串口调试助手显示测试的时间),因为没有用到中断和DMA所以我们就不过多讲解。 ![[_4]XKMS)RD~)AXHXRN)6BP.png](data/attachment/forum/202204/07/111748f9rzfll9y9lbf8wl.png "[_4]XKMS)RD~)AXHXRN)6BP.png")

Step5.接下来进行最主要的定时器配置。首先我们先配置PWM信号,用于等会捕获实验。我这边选用的定时器3通道4(PB1引脚),如原理图所示也就是我们蓝灯的控制IO口,我们更直观的观察到PWM信号的情况。 2R0XPWX5LAI)EAAQ.png")
B45[)E@4`HBDZX~%DU.png")
DDF(AEYEHW911AR4@Q)HTV.png")
Step6.定时器输入捕获参数的配置,因为我们使用的PWM捕获模式,我选用的定时器8通道1和通道2.(更改一下:直接模式和间接模式应该叫直连模式和非直连模式) 8U}FWV2LQ3T3[S3)[KU.png")
GPIFXG@4IYVA_CCG(D.png")
![7ZQJA6D[OB]12QT)_$AQ$H4.png](data/attachment/forum/202204/07/111749qwgd6i96dc1c900i.png "7ZQJA6D[OB]12QT)_$AQ$H4.png")
到这里关于相关参数配置基本已经完成,只需要根据之前文章《STM32Cube HAL:GPIO输入/输出(一)》Step4-Step8,设置相关工程参数和生成代码。 三、添加功能代码 1、我们等会会向串口调试助手发送数据,进行实验结果的验证。 发送数据我们采用printf函数,所有需要重定向c库函数printf到串口。注意使用时需要在keil设置中勾选微库(use mircolib),同时需要添加头文件#include <stdio.h>。重定向代码如下(usart.c)
2、定义相关变量,以及使能相关定时器和计数处理代码(main.c)
3、中断回调函数(捕获中断)(main.c)
关于PWM模式主要需要的注意有两点: 一、PWM模式只能使用通道1和通道2,PWM输入模式工作原理如下图: 

二、用于捕获的定时器时基设置,需要考虑到能捕获的最低频率。 公式:能捕获的最低频率f=(时钟频率/(分频系数PSC+1))/(重装载值ARR+1) 结合这次配置的时基,可得:f=(72000000/(71+1))/(65535+1)=15.2HZ —— —— —— —— —— —— —— 普通的输入捕获模式—— —— —— —— —— —— —— 二、 CubeMX配置 step1-step4与上面PWM输入模式一致 step5.同样是配置PWM信号,用于等会捕获实验。我这边选用的同样是定时器3通道4(PB1引脚)。唯一不同的是,为了验证溢出处理的功能,我做了一点小改动。配置为频率20HZ,占空比为60%的PWM。 

Step6.定时器输入捕获参数的配置,因为我们使用的普通的输入捕获模式,我选用的定时器8通道1。这里没有用到从模式,所以不进行配置。捕获频率最低频率设置为33.3HZ,增加使能更新中断,对溢出进行处理,解决了最小捕获频率的限制。因此我们可以捕获小于33.3HZ的频率。 YNFO_6P(M53N(I_A~5F~TN.png")


到这里关于串口参数配置基本已经完成,只需要根据之前文章《STM32Cube HAL:GPIO输入/输出(一)》Step4-Step8,设置相关工程参数和生成代码。 三、添加功能代码 1、我们等会会向串口调试助手发送数据,进行实验结果的验证。 发送数据我们采用printf函数,所有需要重定向c库函数printf到串口。注意使用时需要在keil设置中勾选微库(use mircolib),同时需要添加头文件#include <stdio.h>。(代码同上) 2、定义相关变量,以及使能相关定时器和处理代码(main.c)
3、中断回调函数(更新中断、捕获中断)(main.c)
关于普通的输入模式捕获PWM。主要工作流程: 1、第一次捕获到上升沿,计数器清零,存捕获寄存器值的变量清零,存中断次数的变量清零。改变触发边沿为下降沿触发,并将触发标志位为设置为1,使下次下降沿触发时,能进行相对应的处理。 2、第一次捕获到下降沿,将捕获寄存器(CCR寄存器)的值,中断次数存入相应的变量。同时更改触发边沿为上升沿触发,并将触发标志位为设置为2,使下次上升沿触发时,能进行相对应的处理。 3、第二次捕获到上升沿,再次将捕获寄存器(CCR寄存器)的值,中断次数存入相应的变量。将触发标志设置为0,目的为能够循环捕获。同时捕获完成标志为置1。 4、在main函数中,使用在while循环,使用if语句进行捕获标志的轮询,从而在捕获完成后进行相应的数据处理。 虽然目前代码的配置以及实验结果是没有问题的。但是在调试时候,碰到一个比较疑惑的问题,ARR的设置影响了捕获的准确性,比如在设置为999和1000的时候,同样是存在溢出的,也进行了溢出处理。但是AAR=999时候频率不稳定,AAR=1000频率正常。暂时还是没法找到合理的解释。 |
![THB5_2EM%0]V34WF8O@B0BP.png](data/attachment/forum/202204/07/111748zlb66p66lpn6bipp.png "THB5_2EM%0]V34WF8O@B0BP.png")
@I0@ZJ(8)}KOTD.png")

【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版