.png) STMCU小助手
发布时间:2022-4-10 19:56
STMCU小助手
发布时间:2022-4-10 19:56
|
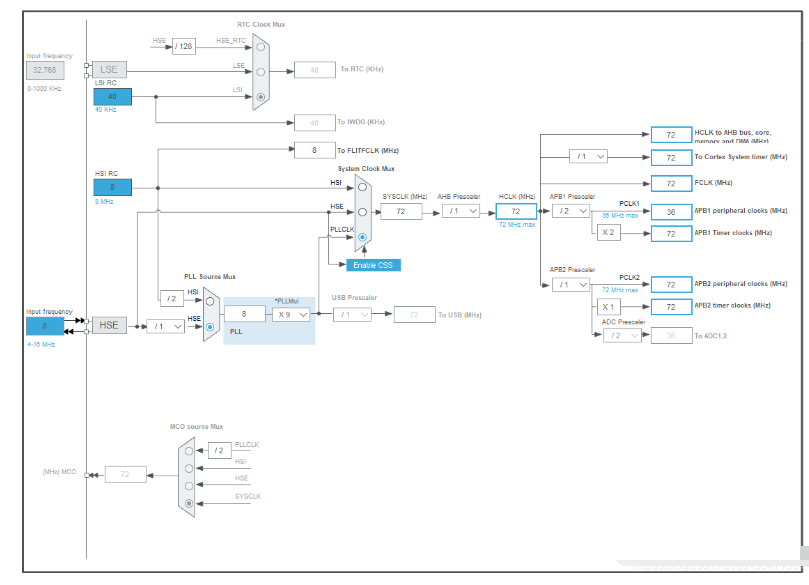
(一)裸机工程创建 使用STM32CubeMX创建裸机工程: 这里我是用的芯片是STM32F103RBT6,时钟主频为72MHz,配置时钟树: 
配置调试串口1: 
配置两个LED灯: 
由于FreeRTOS使用系统嘀嗒定时器当作心跳,HAL库也使用了这个定时器当作超时计数用,FreeRTOS和HAL库不能同时使用SysTick定时器,所在在这里将HAL库的定时器改为其他的定时器,我改成了定时器4: ![ZW]AZRZ6{KK3FJ9V~Y{}D~Q.png](data/attachment/forum/202204/10/195649arilttbt8dlidti4.png "ZW]AZRZ6{KK3FJ9V~Y{}D~Q.png")
配置中断,注意这里一定要选择组4,也就是全部为抢占优先级: ![ANO~JLI_}E$E1]8B6U78I[X.png](data/attachment/forum/202204/10/195650nrbc1rrnrodbb6yi.png "ANO~JLI_}E$E1]8B6U78I[X.png")
输出工程: 

(二)移植FreeRTOS 解压FreeRTOS源码包有如下文件结构: ![7L$%8]J0YCQ2N2IE`HG1PJN.png](data/attachment/forum/202204/10/195650b1jggg62g6fk65a6.png "7L$%8]J0YCQ2N2IE`HG1PJN.png")
在Keil工程目录下新建FreeRTOS文件夹用于存放freertos的源码。 拷贝FreeRTOS/Source/文件夹内的以下文件,放入keil工程目录FreeRTOS文件夹内,效果如下图: 
在Keil中将FreeRTOS源码加入到工程内: ![0]DPJOU3QX3U0ZAN46OSQ04.png](data/attachment/forum/202204/10/195650y0kdvv85vb75b5b5.png "0]DPJOU3QX3U0ZAN46OSQ04.png")
打开stm32f1xx_it.c文件,在头部添加FreeRTOS的三个函数导入:
![3DC746)588]2)A%~F[L%ERS.png](data/attachment/forum/202204/10/195651w1fordeo1zeoe46a.png "3DC746)588]2)A%~F[L%ERS.png")
在函数SVC_Handler中添加函数调用: 
在函数PendSV_Handler中添加函数调用: 
在函数SysTick_Handler中添加函数调用: 
新建一个名为FreeRTOSConfig.h的文件,这是FreeRTOS的配置文件,这里我贴一个我配置的:
修改main.c文件,添加头文件:
这里我创建了三个任务,任务一为led1灯每间隔500ms闪烁一次,任务二led2每间隔300ms闪烁一次,任务三为串口每隔1s打印一次helloworld。
到此,移植完毕! 总结:移植FreeRTOS还是相对简单的,主要是配置文件FreeRTOSConfig.h的配置,每个宏定义所代表的意思需要好好查阅! |
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
【下载有礼】STM32 Finder华为应用商店正式上线!移动选型工具助力开发效率升级
【2025·STM32峰会】GUI解决方案实训分享5-调通板载的NRF24L01 SPI接口并使用模块进行无线通信(发送和接收)
 微信公众号
微信公众号
 手机版
手机版