.png) STMCU小助手
发布时间:2022-4-12 10:00
STMCU小助手
发布时间:2022-4-12 10:00
|
介绍 数字舵机一般比较贵,数字舵机与模拟舵机的区别是前者在得到相应的脉冲后,会很清脆的到达固定的角度,不会产生异响;而模拟舵机则会在到达固定角度后抖动。 控制方法 数字舵机大多是是依靠PWM进行控制,舵机一个周期是20ms,给定固定占空比,则会转到相应的角度;例如让舵机转到90度的位置,那么20ms的周期内就是让低电平占1.5ms,这样就控制了舵机转到90度。对应如下表: 
所以我们的方法就是使用STM32单片机的定时器输出周期为20ms的PWM波,通过更改占空比值实现舵机的角度控制。通过上表可以得到一个公式:一度的占空比 = 1 / 90 * 角度 + 0.5 STM32配置 这里我使用STM32F407VE,配置定时器3和PWM通道1,配置如下: 
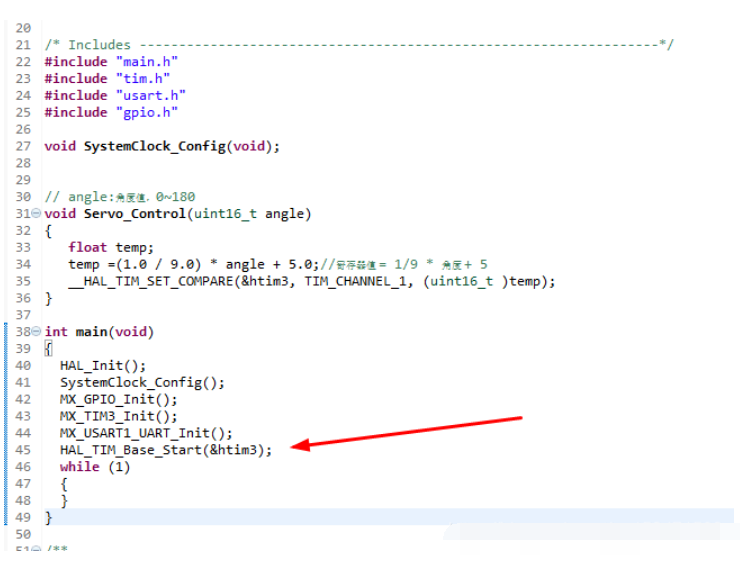
定时器3的时钟主频是84M,这里我分8400频(8399+1),计数值200(199+1), 所得到的定时周期时间就是:200 * 8400 / 84000000 = 0.02s = 20ms PWM的频率就是:84000000 / (200 * 8400) = 50HZ 按照以上配置计算,那么上面的公式就要扩大十倍,变为:一度的占空比 = 1 / 90 * 角度 + 5 转为代码就是:
通过该函数,就可以很方便的控制数字舵机转动了! 注意: STM32CUBEMX生成的代码不是使能定时器,所以需要你手动添加下面一行代码使能定时器:
![L]0W9O@0FFP8O(GDZX2Q~IP.png](data/attachment/forum/202204/11/103338mloflm2flgls82hq.png "L]0W9O@0FFP8O(GDZX2Q~IP.png")
|
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版