背景
延时函数在STM32单片机开发的项目中有广泛的应用,微秒级延时在一些时间要求严格的场景下(例如软件模拟I2C通讯)是必不可少的。由于FreeRTOS默认采用了system tick作为时间片分配的时基定时器,可能与利用system tick设计的延时函数出现冲突。再加上FreeRTOS提供的延时函数void vTaskDelay( const TickType_t xTicksToDelay )最小的延时时间等于FreeRTOS的tick时间(一般设置为1ms),因此需要重新设计一套不基于system tick的微秒级延时函数。利用CM3/4内核中的数据观察点与跟踪(DWT)寄存器,可以在不占用硬件外设定时器的情况下实现微秒级的精准延时。
源码
通过选择#define USE_SYS_TICK, #define USE_DWT, #define USE_NOP_DELAY其中一个宏定义来决定delay函数的实现方式。需要特别注意的是,由于函数调用是需要时间的,因此使用延时函数时,一般会额外多出一些时间(1微秒左右)。
#define USE_SYS_TICK是利用system tick设计的延时函数,在没有使用实时操作系统的时候,它是一个比较适合实现微秒级延时的通用方法。
#define USE_DWT是利用CM3/4内核DWT寄存器设计的延时函数,它具有不占用system tick与外设定时器,延时精度高的特点。
#define USE_NOP_DELAY是利用了空指令设计的延时函数,它主要实现微秒以下的超短时间延时。
头文件
- #ifndef __DELAY_H__
- #define __DELAY_H__
- #include "stm32f10x_conf.h"
- #include "stm32f10x.h"
- //#define USE_SYS_TICK
- #define USE_DWT
- //#define USE_NOP_DELAY
- void delay_init(void);
- void delay_ms(uint16_t ms);
- void delay_us(u32 us);
- /**
- * 定义ns级延时,72M主频下,每一条空指令大约14ns
- */
- //#define DELAY_6ns() __NOP()
- //#define DELAY_12ns() DELAY_6ns(); __NOP()
- //#define DELAY_18ns() DELAY_12ns(); __NOP()
- //#define DELAY_24ns() DELAY_18ns(); __NOP()
- //#define DELAY_30ns() DELAY_24ns(); __NOP()
- //#define DELAY_60ns() DELAY_30ns(); DELAY_30ns()
- //#define DELAY_90ns() DELAY_60ns(); DELAY_30ns()
- #endif
源文件
- #include "delay.h"
- #ifdef USE_SYS_TICK
- static uint8_t fac_us = 0; //us延时倍乘数
- static uint16_t fac_ms = 0; //ms延时倍乘数,在ucos下,代表每个节拍的ms数
- //初始化延迟函数
- //当使用OS的时候,此函数会初始化OS的时钟节拍
- //SYSTICK的时钟固定为HCLK时钟的1/8
- //SYSCLK:系统时钟
- void delay_init()
- {
- SysTick_CLKSourceConfig ( SysTick_CLKSource_HCLK_Div8 ); //选择外部时钟 HCLK/8
- fac_us = SystemCoreClock / 8000000; //为系统时钟的1/8
- fac_ms = ( uint16_t ) fac_us * 1000; //非OS下,代表每个ms需要的systick时钟数
- }
- //延时nus
- //nus为要延时的us数.
- void delay_us ( u32 us )
- {
- u32 temp;
- SysTick->LOAD = us * fac_us; //时间加载
- SysTick->VAL = 0x00; //清空计数器
- SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk ; //开始倒数
- do
- {
- temp = SysTick->CTRL;
- }
- while ( ( temp & 0x01 ) && ! ( temp & ( 1 << 16 ) ) ); //等待时间到达
- SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk; //关闭计数器
- SysTick->VAL = 0X00; //清空计数器
- }
- //延时nms
- //注意nms的范围
- //SysTick->LOAD为24位寄存器,所以,最大延时为:
- //nms<=0xffffff*8*1000/SYSCLK
- //SYSCLK单位为Hz,nms单位为ms
- //对72M条件下,nms<=1864
- void delay_ms ( uint16_t ms )
- {
- u32 temp;
- SysTick->LOAD = ( u32 ) ms * fac_ms; //时间加载(SysTick->LOAD为24bit)
- SysTick->VAL = 0x00; //清空计数器
- SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk ; //开始倒数
- do
- {
- temp = SysTick->CTRL;
- }
- while ( ( temp & 0x01 ) && ! ( temp & ( 1 << 16 ) ) ); //等待时间到达
- SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk; //关闭计数器
- SysTick->VAL = 0X00; //清空计数器
- }
- #elif defined USE_DWT
- // 0xE000EDFC DEMCR RW Debug Exception and Monitor Control Register.
- #define DEMCR ( *(__IO uint32_t *)0xE000EDFC )
- #define TRCENA ( 0x01 << 24) // DEMCR的DWT使能位
- #define DBGMCU_CR *(__IO uint32_t *)0xE0042004 //MCU调试模块控制寄存器,详细内容参考《stm32中文参考手册》调试支持(DBG)章节,747页
- // 0xE0001000 DWT_CTRL RW The Debug Watchpoint and Trace (DWT) unit
- #define DWT_CTRL ( *(__IO uint32_t *)0xE0001000 )
- #define DWT_CTRL_CYCCNTENA ( 0x01 << 0 ) // DWT的SYCCNT使能位
- // 0xE0001004 DWT_CYCCNT RW Cycle Count register,
- #define DWT_CYCCNT ( *(__IO uint32_t *)0xE0001004) // 显示或设置处理器的周期计数值
- //#define DWT_DELAY_mS(mSec) DWT_DELAY_uS(mSec*1000)
- void delay_init()
- {
- //使能DWT外设
- DEMCR |= (uint32_t)TRCENA;
- //DWT CYCCNT寄存器计数清0
- DWT_CYCCNT = (uint32_t)0u;
- //使能Cortex-M3 DWT CYCCNT寄存器
- DWT_CTRL |= (uint32_t)DWT_CTRL_CYCCNTENA;
- }
- // 微秒延时
- void delay_us(uint16_t uSec)
- {
- if(uSec > 10000) uSec = 10000;
- uint32_t ticks_start, ticks_end, ticks_delay;
- ticks_start = DWT_CYCCNT;
- ticks_delay = ( uSec * ( SystemCoreClock / (1000000) ) ); // 将微秒数换算成滴答数
- ticks_end = ticks_start + ticks_delay;
- // ticks_end没有溢出
- if ( ticks_end >= ticks_start )
- {
- // DWT_CYCCNT在上述计算的这段时间中没有溢出
- if(DWT_CYCCNT > ticks_start)
- {
- while( DWT_CYCCNT < ticks_end );
- }
- // DWT_CYCCNT溢出
- else
- {
- // 已经超时,直接退出
- return;
- }
- }
- else // ticks_end溢出
- {
- // DWT_CYCCNT在上述计算的这段时间中没有溢出
- if(DWT_CYCCNT > ticks_start)
- {
- // 等待DWT_CYCCNT的值溢出
- while( DWT_CYCCNT > ticks_end );
- }
- // 等待溢出后的DWT_CYCCNT到达ticks_end
- while( DWT_CYCCNT < ticks_end );
- }
- }
- void delay_ms(uint16_t ms)
- {
- for(uint16_t i = 0; i < ms; i++)
- {
- // delay 1 ms
- delay_us(1000);
- }
- }
- #elif defined USE_NOP_DELAY
- void delay_init(void)
- {
- }
- void delay_ms(uint16_t ms)
- {
- }
- void delay_us(u32 us)
- {
- }
- #else
- #endif
特别说明
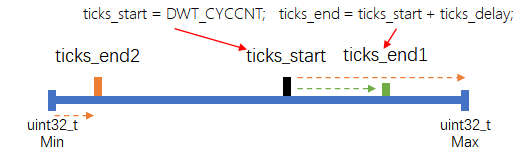
使用DWT内核的延时函数中,涉及了两次数据溢出处理,第一次数据溢出处理是指计算结束时间(ticks_end = ticks_start + ticks_delay)发生溢出,如下图所示:
这里有个限制条件就是延时长度(ticks_delay)不能超过uint32_t的最大值,但考虑到这是一个极大的数值,几乎不可能发生,因此可以简化处理限制微秒延时函数的输入参数小于10k,以提高延时精度。对于这个溢出判断就比较明确了:
- if ( ticks_end >= ticks_start )
- {
- // 计算未溢出
- }
- else
- {
- // 计算溢出
- }
第二个溢出相对比较复杂,处理不当会导致严重问题,尤其是使用了RTOS的系统中有很可能遇到。其核心原因是从标记初始化时间戳ticks_start = DWT_CYCCNT到准备比较时间戳例如while( DWT_CYCCNT < ticks_end );的这段时间的耗时是不确定的。即使没有使用RTOS,如下代码(使用绿色底色标注)在执行时也可能被硬中断暂停,从而导致DWT_CYCCNT时间戳可能已经越过了ticks_end ,或者也发生了溢出重置。
- ticks_start = DWT_CYCCNT;
- ticks_delay = ( uSec * ( SystemCoreClock / (1000000) ) ); // 将微秒数换算成滴答数
- ticks_end = ticks_start + ticks_delay;
- if ( ticks_end >= ticks_start )
- {
- // DWT_CYCCNT在上述计算的这段时间中没有溢出
- if(DWT_CYCCNT > ticks_start)
- {
- }
- else
- {
-
- }
- }
- else
- {
- // DWT_CYCCNT在上述计算的这段时间中没有溢出
- if(DWT_CYCCNT > ticks_start)
- {
- }
- else
- {
-
- }
- }
因此需要根据延时等待操作时DWT_CYCCNT所处位置再进行一次判断:

ticks_end未溢出时(ticks_end1):
DWT_CYCCNT未溢出(DWT_CYCCNT2 & DWT_CYCCNT3)时:while( DWT_CYCCNT < ticks_end );
DWT_CYCCNT溢出(DWT_CYCCNT4)时:直接返回。
ticks_end溢出时(ticks_end2):
DWT_CYCCNT未溢出(DWT_CYCCNT2)时:while( DWT_CYCCNT > ticks_end ); while( DWT_CYCCNT < ticks_end );
DWT_CYCCNT溢出(DWT_CYCCNT4 & DWT_CYCCNT5)时:while( DWT_CYCCNT < ticks_end );
6S95828HELIL(I$Y$TG.png")
使用指南
在程序开始的地方初始化延时函数:delay_init();
在需要延时的地方调用延时函数:delay_us(10);
需要特别说明的是,在FreeRTOS的任务中调用本文介绍的例如void delay_us(uint32_t us)等延时函数,任务会阻塞等待延时结束。如果是调用FreeRTOS提供的延时函数void vTaskDelay( const TickType_t xTicksToDelay ),系统会执行低优先级任务直到延时结束。
|
.png) STMCU小助手
发布时间:2022-4-13 11:00
STMCU小助手
发布时间:2022-4-13 11:00
 微信公众号
微信公众号
 手机版
手机版