.png) STMCU小助手
发布时间:2022-4-20 20:40
STMCU小助手
发布时间:2022-4-20 20:40
|
一、TM1637介绍 TM1637 是一种带键盘扫描接口的LED(发光二极管显示器)驱动控制专用电路,内部集成有MCU 数字接口、数据锁存器、LED 高压驱动、键盘扫描等电路。本产品性能优良,质量可靠。主要应用于电磁炉、微波炉及小家电产品的显示屏驱动。采用DIP/SOP20的封装形式。 功能特点: 采用功率CMOS 工艺 显示模式(8 段×6 位),支持共阳数码管输出 键扫描(8×2bit),增强型抗干扰按键识别电路 辉度调节电路(占空比 8 级可调) 两线串行接口(CLK,DIO) 振荡方式:内置RC 振荡 内置上电复位电路 内置自动消隐电路 封装形式:DIP20/SOP20 二、时序介绍 6U0P11OYC_M@IY`U.png")

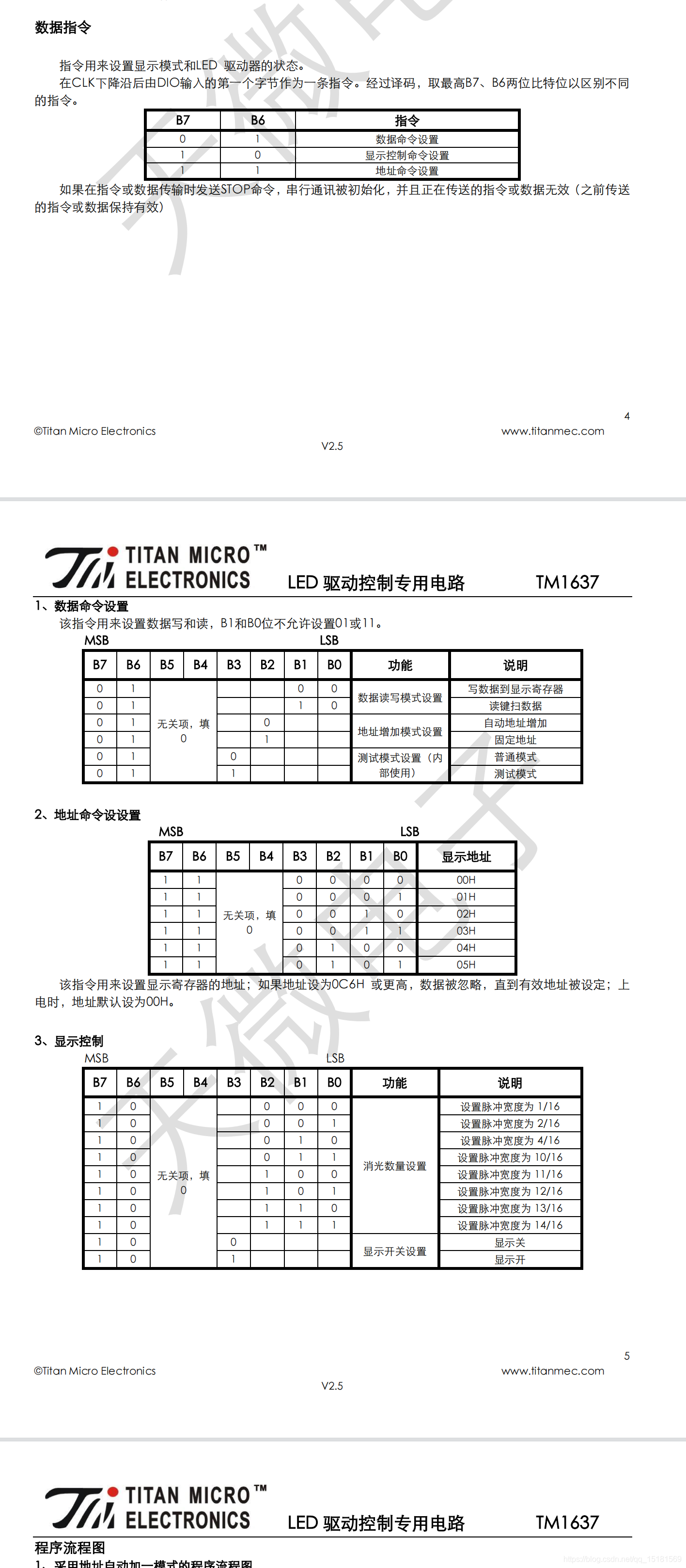
三、寄存器介绍 
四、驱动程序 main.c
tm1637.c
|
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版