一、WK2168介绍
WK2168是首款具备256级FIFO的低功耗并支持 UART/SPITM/IIC/8位并行总线接口的
4通道UART器件。可以通过模式选择使得该芯片工作于以上任何一种主接口模式,将选
定的主接口扩展为4个增强功能的UART。
扩展的子通道的UART具备如下功能特点:
1.每个子通道UART的波特率、字长、校验格式可以独立设置,最高可以提供2Mbps
的通信速率。
2.每个子通道可以独立设置工作在IrDA红外通信、 RS-485自动收发控制、 9位网络
地址自动识别、软件/硬件自动流量控制等高级工作模式下。
3.每个子通道具备收/发独立的256 级FIFO, FIFO的中断可按用户需求进行编程触
发点且具备超时中断功能。
WK2168采用LQFP48绿色环保的无铅封装,可以工作在2.5~5.0V的宽工作电压范围,
具备可配置自动休眠/唤醒功能
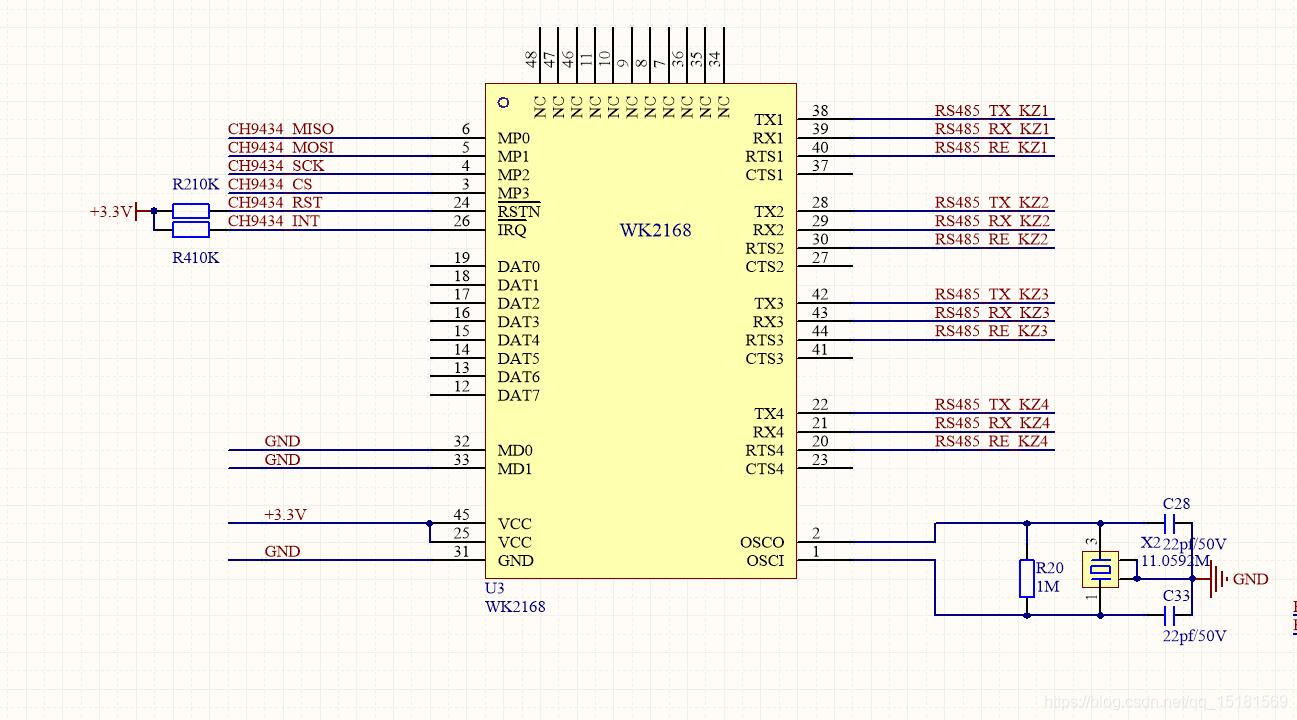
二、硬件连接


三、驱动代码
main.c
- #include "sys.h"
- #include "delay.h"
- #include "usart.h"
- #include "led.h"
- #include "wk2168.h"
- int main(void)
- {
- //wk2xxx相关定义
- u8 sendTimeCnt;
- u16 ledCnt;
- u8 dat1;
- u8 sendData[5]={0x01,0x02,0x03,0x04,0x05};
-
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
- delay_init();
- uart_init(115200);
- led_init();
- wk2168_init();
- wk2168_exit_init();
- /*读写GNEA,测试主接口通信是否成功*/
- dat1=wk2168_read_g_reg(WK2XXX_GENA);
- printf("gena=0x%x.\r\n",dat1);
- /*初始化子串口*/
- wk2168_sub_uart_init(1);
- wk2168_sub_uart_init(2);
- wk2168_sub_uart_init(3);
- wk2168_sub_uart_init(4);
- /*设置子串口波特率*/
- wk2168_set_baudrate(1,B9600);
- wk2168_set_baudrate(2,B9600);
- wk2168_set_baudrate(3,B9600);
- wk2168_set_baudrate(4,B9600);
- /*使能485*/
- wk2168_set_rs485(1);
- wk2168_set_rs485(2);
- wk2168_set_rs485(3);
- wk2168_set_rs485(4);
-
- while(1)
- {
-
- sendTimeCnt++;
- if(sendTimeCnt>=100)
- {
- sendTimeCnt=0;
- wk2168_exti_disable();
- wk2168_write_s_fifo(1,sendData,sizeof(sendData));
- wk2168_write_s_fifo(2,sendData,sizeof(sendData));
- wk2168_write_s_fifo(3,sendData,sizeof(sendData));
- wk2168_write_s_fifo(4,sendData,sizeof(sendData));
- wk2168_exti_enable();
-
- }
-
-
- ledCnt++;
- if(ledCnt>=50)
- {
- ledCnt=0;
- turn_prog_led();
- }
-
- delay_ms(10);
- }
- }
wk2168.c
- #include "wk2168.h"
- #include "delay.h"
- void wk2168_init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- SPI_InitTypeDef SPI_InitStructure;
-
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB | RCC_APB2Periph_SPI1, ENABLE );
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;//PA0--INT#
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init( GPIOB, &GPIO_InitStructure );
-
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//SPI1_RST
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init( GPIOB, &GPIO_InitStructure );
- GPIO_SetBits(GPIOB,GPIO_Pin_0);
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;//SPI1_CS
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init( GPIOA, &GPIO_InitStructure );
- GPIO_SetBits(GPIOA,GPIO_Pin_4);
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;//SPI1_SCK
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init( GPIOA, &GPIO_InitStructure );
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//SPI1_MISO
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init( GPIOA, &GPIO_InitStructure );
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;//SPI1_MOSI
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init( GPIOA, &GPIO_InitStructure );
-
- SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
-
- SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
- SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
- SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
- SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
- SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
- SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8;
- SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
- SPI_InitStructure.SPI_CRCPolynomial = 7;
- SPI_Init( SPI1, &SPI_InitStructure );
- SPI_Cmd( SPI1, ENABLE );
-
- wk2168_rst=0;
- delay_ms(50);
- wk2168_rst=1;
- delay_ms(10);
-
- }
- void wk2168_exit_init()
- {
- EXTI_InitTypeDef EXTI_InitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用功能时钟
- GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);//下降沿触发
- EXTI_InitStructure.EXTI_Line=EXTI_Line1;
- EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
- EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
- EXTI_InitStructure.EXTI_LineCmd = ENABLE;
- EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
- NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //使能按键KEY2所在的外部中断通道
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01; //抢占优先级2,
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; //子优先级2
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
- NVIC_Init(&NVIC_InitStructure);
- }
- void wk2168_exti_enable(void)
- {
- NVIC_InitTypeDef NVIC_InitStructure;
-
- NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //使能按键KEY2所在的外部中断通道
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x00; //抢占优先级2,
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级2
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
- NVIC_Init(&NVIC_InitStructure);
- }
- void wk2168_exti_disable(void)
- {
- NVIC_InitTypeDef NVIC_InitStructure;
-
- NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //使能按键KEY2所在的外部中断通道
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x00; //抢占优先级2,
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级2
- NVIC_InitStructure.NVIC_IRQChannelCmd = DISABLE; //使能外部中断通道
- NVIC_Init(&NVIC_InitStructure);
- }
- //外部中断0服务程序
- void EXTI1_IRQHandler(void)
- {
- u8 gifr,rxbuf[256];
- int rxlen;
- if(EXTI_GetFlagStatus(EXTI_Line1)!= RESET)
- {
- gifr=wk2168_read_g_reg(WK2XXX_GIFR);/**/
- do{
- if(gifr&WK2XXX_UT1INT)//判断子串口1是否有中断
- {
- /*数据处理*/
- /*数据接收*/
- rxlen=wk2168_rec_data(1,rxbuf);//一次接收的数据不会超过256Byte
- /*数据发送*/
- //把接收的数据发送出去
- wk2168_send_data(1,rxlen,rxbuf);
- }
-
- if(gifr&WK2XXX_UT2INT)//判断子串口2是否有中断
- {
- /*数据接收*/
- rxlen=wk2168_rec_data(2,rxbuf);//一次接收的数据不会超过256Byte
- /*数据发送*/
- //把接收的数据发送出去
- wk2168_send_data(2,rxlen,rxbuf);
-
- }
- if(gifr&WK2XXX_UT3INT)//判断子串口3是否有中断
- {
- /*数据接收*/
- rxlen=wk2168_rec_data(3,rxbuf);//一次接收的数据不会超过256Byte
- /*数据发送*/
- //把接收的数据发送出去
- wk2168_send_data(3,rxlen,rxbuf);
- // printf("port!!!!\n");
- }
- if(gifr&WK2XXX_UT4INT)//判断子串口4是否有中断
- {
- /*数据接收*/
- rxlen=wk2168_rec_data(4,rxbuf);//一次接收的数据不会超过256Byte
- /*数据发送*/
- //把接收的数据发送出去
- wk2168_send_data(4,rxlen,rxbuf);
- }
-
- gifr=wk2168_read_g_reg(WK2XXX_GIFR);
- //printf("IN EXTI2_IRQ GIFR:0X%X !!!\n",gifr);
- }while(gifr&0x0f);
- EXTI_ClearITPendingBit(EXTI_Line1); //清除LINE0上的中断标志位
- }
- }
- /* SPI交换一个字节接口 */
- u8 wk2168_spi_read_write_byte(u8 TxData)
- {
- u8 retry=0;
- while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
- {
- retry++;
- if(retry>200)return 0;
- }
- SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个数据
- retry=0;
- while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET) //检查指定的SPI标志位设置与否:接受缓存非空标志位
- {
- retry++;
- if(retry>200)return 0;
- }
- return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
- }
- /*************************************************************************/
- //函数功能:设置CS信号为高电平
- /*************************************************************************/
- void wk2168_cs_high(void)
- {
- GPIO_SetBits(GPIOA,GPIO_Pin_4);
- }
- /*************************************************************************/
- //函数功能:设置CS信号为低电平
- /*************************************************************************/
- void wk2168_cs_low(void)
- {
- GPIO_ResetBits(GPIOA,GPIO_Pin_4);
- }
- /***************************wk2168_write_g_reg***********************************/
- //函数功能:写全局寄存器函数(前提是该寄存器可写,
- //某些寄存器如果你写1,可能会自动置1,具体见数据手册)
- //参数:
- // greg:为全局寄存器的地址
- // dat:为写入寄存器的数据
- //***********************************************************************/
- void wk2168_write_g_reg(unsigned char greg,unsigned char dat)
- {
- u8 cmd;
- cmd=0|greg;
- wk2168_cs_low();//拉低cs信号
- wk2168_spi_read_write_byte(cmd); //写指令,对于指令的构成见数据手册
- wk2168_spi_read_write_byte(dat);//写数据
- wk2168_cs_high();//拉高cs信号
- }
- /****************************wk2168_read_g_reg***********************************/
- //函数功能:读全局寄存器
- //参数:
- // greg:为全局寄存器的地址
- // rec:返回的寄存器值
- //***********************************************************************/
- u8 wk2168_read_g_reg(unsigned char greg)
- {
- u8 cmd,rec;
- cmd=0x40|greg;
- wk2168_cs_low();//拉低cs信号
- wk2168_spi_read_write_byte(cmd); //写指令,对于指令的构成见数据手册
- rec=wk2168_spi_read_write_byte(0);//写数据
- wk2168_cs_high();//拉高cs信号
- return rec;
- }
- /**************************wk2168_write_s_reg***********************************/
- //函数功能:
- //参数:port:为子串口
- // sreg:为子串口寄存器
- // dat:为写入寄存器的数据
- //注意:在子串口被打通的情况下,向FDAT写入的数据会通过TX引脚输出
- //**********************************************************************/
- void wk2168_write_s_reg(u8 port,u8 sreg,u8 dat)
- {
- u8 cmd;
- cmd=0x0|((port-1)<<4)|sreg;
- wk2168_cs_low();//拉低cs信号
- wk2168_spi_read_write_byte(cmd); //写指令,对于指令的构成见数据手册
- wk2168_spi_read_write_byte(dat);//写数据
- wk2168_cs_high();//拉高cs信号
- }
- /**************************wk2168_read_s_reg***********************************/
- //函数功能:读子串口寄存器
- //参数:port为子串口端口号
- // sreg:为子串口寄存器地址
- // rec:返回的寄存器值
- //**********************************************************************/
- u8 wk2168_read_s_reg(u8 port,u8 sreg)
- {
- u8 cmd,rec;
- cmd=0x40|((port-1)<<4)|sreg;
- wk2168_cs_low();//拉低cs信号
- wk2168_spi_read_write_byte(cmd); //写指令,对于指令的构成见数据手册
- rec=wk2168_spi_read_write_byte(0);//写数据
- wk2168_cs_high(); //拉高cs信号
- return rec;
- }
- /************************wk2168_write_s_fifo***********************************/
- //函数功能:向子串口fifo写入需要发送的数据
- //参数:port:为子串口
- // *dat:写入数据
- // num:为写入数据的个数,单次不超过256
- //注意:通过该方式写入的数据,被直接写入子串口的缓存FIFO,然后被发送
- //*********************************************************************/
- void wk2168_write_s_fifo(u8 port,u8 *dat,int num)
- {
- u8 cmd;
- int i;
- cmd=0x80|((port-1)<<4);
- if(num>0)
- {
- wk2168_cs_low();//拉低cs信号
- wk2168_spi_read_write_byte(cmd); //写指令,对于指令构成见数据手册
- for(i=0;i<num;i++)
- {
- wk2168_spi_read_write_byte( *(dat+i));//写数据
- }
- wk2168_cs_high();//拉高cs信号
- }
- }
- /************************wk2168_read_s_fifo***********************************/
- //函数功能:从子串口的fifo中读出接收到的数据
- //参数:port:为子串口
- // *rec:接收到的数据
- // num:读出的数据个数。
- //注意:通过该方式读出子串口缓存中的数据。单次不能超过256
- //*********************************************************************/
- void wk2168_read_s_fifo(u8 port,u8 *rec,int num)
- {
- u8 cmd;
- int n;
- cmd=0xc0|((port-1)<<4);
- if(num>0)
- {
- wk2168_cs_low();//拉低cs信号
- wk2168_spi_read_write_byte(cmd);
- for(n=0;n<num;n++)
- {
- *(rec+n)=wk2168_spi_read_write_byte(0);
- }
- wk2168_cs_high();//拉高cs信号
- }
- }
- /*******WkInit*******************************************/
- //函数功能:初始化子串口
- /*******************************************************/
- void wk2168_sub_uart_init(u8 port)
- {
- u8 gena,grst,gier,sier,scr;
- //使能子串口时钟
- gena=wk2168_read_g_reg(WK2XXX_GENA);
- gena=gena|(1<<(port-1));
- wk2168_write_g_reg(WK2XXX_GENA,gena);
- //软件复位子串口
- grst=wk2168_read_g_reg(WK2XXX_GRST);
- grst=grst|(1<<(port-1));
- wk2168_write_g_reg(WK2XXX_GRST,grst);
- //使能串口总中断
- gier=wk2168_read_g_reg(WK2XXX_GIER);
- gier=gier|(1<<(port-1));
- wk2168_write_g_reg(WK2XXX_GIER,gier);
- //使能子串口接收触点中断和超时中断
- sier=wk2168_read_s_reg(port,WK2XXX_SIER);
- sier |= WK2XXX_RFTRIG_IEN|WK2XXX_RXOUT_IEN;
- wk2168_write_s_reg(port,WK2XXX_SIER,sier);
- //初始化FIFO和设置固定中断触点
- wk2168_write_s_reg(port,WK2XXX_FCR,0XFF);
- //设置任意中断触点,如果下面的设置有效,
- //那么上面FCR寄存器中断的固定中断触点将失效
- wk2168_write_s_reg(port,WK2XXX_SPAGE,1);//切换到page1
- wk2168_write_s_reg(port,WK2XXX_RFTL,0X40);//设置接收触点为64个字节
- wk2168_write_s_reg(port,WK2XXX_TFTL,0X10);//设置发送触点为16个字节
- wk2168_write_s_reg(port,WK2XXX_SPAGE,0);//切换到page0
- //使能子串口的发送和接收使能
- scr=wk2168_read_s_reg(port,WK2XXX_SCR);
- scr|=WK2XXX_TXEN|WK2XXX_RXEN;
- wk2168_write_s_reg(port,WK2XXX_SCR,scr);
- }
- /******************************wk2168_sub_uart_deinit*******************************************/
- //函数功能:初始化子串口
- /*********************************************************************************/
- void wk2168_sub_uart_deinit(u8 port)
- {
- u8 gena,grst,gier;
- //关闭子串口总时钟
- gena=wk2168_read_g_reg(WK2XXX_GENA);
- gena=gena&(~(1<<(port-1)));
- wk2168_write_g_reg(WK2XXX_GENA,gena);
- //使能子串口总中断
- gier=wk2168_read_g_reg(WK2XXX_GIER);
- gier=gier&(~(1<<(port-1)));
- wk2168_write_g_reg(WK2XXX_GIER,gier);
- //软件复位子串口
- grst=wk2168_read_g_reg(WK2XXX_GRST);
- grst=grst|(1<<(port-1));
- wk2168_write_g_reg(WK2XXX_GRST,grst);
-
- }
- /**************************wk2168_set_baudrate*******************************************************/
- //函数功能:设置子串口波特率函数、此函数中波特率的匹配值是根据11.0592Mhz下的外部晶振计算的
- // port:子串口号
- // baud:波特率大小.波特率表示方式,
- /**************************Wk2114SetBaud*******************************************************/
- void wk2168_set_baudrate(u8 port,enum WKBaud baud)
- {
- unsigned char baud1,baud0,pres,scr;
- //如下波特率相应的寄存器值,是在外部时钟为11.0592mhz的情况下计算所得,如果使用其他晶振,需要重新计算
- switch (baud)
- {
- case B600:
- baud1=0x4;
- baud0=0x7f;
- pres=0;
- break;
- case B1200:
- baud1=0x2;
- baud0=0x3F;
- pres=0;
- break;
- case B2400:
- baud1=0x1;
- baud0=0x1f;
- pres=0;
- break;
- case B4800:
- baud1=0x00;
- baud0=0x8f;
- pres=0;
- break;
- case B9600:
- baud1=0x00;
- baud0=0x47;
- pres=0;
- break;
- case B19200:
- baud1=0x00;
- baud0=0x23;
- pres=0;
- break;
- case B38400:
- baud1=0x00;
- baud0=0x11;
- pres=0;
- break;
- case B76800:
- baud1=0x00;
- baud0=0x08;
- pres=0;
- break;
- case B1800:
- baud1=0x01;
- baud0=0x7f;
- pres=0;
- break;
- case B3600:
- baud1=0x00;
- baud0=0xbf;
- pres=0;
- break;
- case B7200:
- baud1=0x00;
- baud0=0x5f;
- pres=0;
- break;
- case B14400:
- baud1=0x00;
- baud0=0x2f;
- pres=0;
- break;
- case B28800:
- baud1=0x00;
- baud0=0x17;
- pres=0;
- break;
- case B57600:
- baud1=0x00;
- baud0=0x0b;
- pres=0;
- break;
- case B115200:
- baud1=0x00;
- baud0=0x05;
- pres=0;
- break;
- case B230400:
- baud1=0x00;
- baud0=0x02;
- pres=0;
- break;
- default:
- baud1=0x00;
- baud0=0x00;
- pres=0;
- }
- //关掉子串口收发使能
- scr=wk2168_read_s_reg(port,WK2XXX_SCR);
- wk2168_write_s_reg(port,WK2XXX_SCR,0);
- //设置波特率相关寄存器
- wk2168_write_s_reg(port,WK2XXX_SPAGE,1);//切换到page1
- wk2168_write_s_reg(port,WK2XXX_BAUD1,baud1);
- wk2168_write_s_reg(port,WK2XXX_BAUD0,baud0);
- wk2168_write_s_reg(port,WK2XXX_PRES,pres);
- wk2168_write_s_reg(port,WK2XXX_SPAGE,0);//切换到page0
- //使能子串口收发使能
- wk2168_write_s_reg(port,WK2XXX_SCR,scr);
- }
- /**************************wk2168_get_tx_len*******************************************/
- //函数功能:获取子串口发送FIFO剩余空间长度
- // port:端口号
- // 返回值:发送FIFO剩余空间长度
- /**************************WK_Len********************************************/
- int wk2168_get_tx_len(u8 port)
- {
- u8 fsr,tfcnt;
- int len=0;
- fsr =wk2168_read_s_reg(port,WK2XXX_FSR);
- tfcnt=wk2168_read_s_reg(port,WK2XXX_TFCNT);
- if(fsr& WK2XXX_TFULL)
- {
- len=0;
- }
- else
- {
- len=256-tfcnt;
- }
- return len;
- }
- /**************************wk2168_send_data*******************************************/
- //函数功能:通过子串口发送固定长度数据
- // port:端口号
- // len:单次发送长度不超过256
- //
- /**************************wk2168_send_data********************************************/
- int wk2168_send_data(u8 port,int len,u8 *sendbuf)
- {
-
- #if 1
- wk2168_write_s_fifo(port,sendbuf,len);//通过fifo方式发送数据
- #else
- int num=len;
- for(num=0;num<len;num++)
- {
- wk2168_write_s_reg(port,WK2XXX_FDAT,*(sendbuf+num));
- }
- #endif
- return 0;
- }
- /**************************wk2168_rec_data*******************************************/
- //函数功能:读取子串口fifo中的数据
- // port:端口号
- // recbuf:接收到的数据
- // 返回值:接收数据的长度
- /**************************wk2168_rec_data********************************************/
- int wk2168_rec_data(u8 port,u8 *recbuf)
- {
- u8 fsr=0,rfcnt=0,rfcnt2=0,sifr=0;
- int len=0;
- sifr=wk2168_read_s_reg(port,WK2XXX_SIFR);
-
- if((sifr&WK2XXX_RFTRIG_INT)||(sifr&WK2XXX_RXOVT_INT))//有接收中断和接收超时中断
- {
- fsr =wk2168_read_s_reg(port,WK2XXX_FSR);
- rfcnt=wk2168_read_s_reg(port,WK2XXX_RFCNT);
- rfcnt2=wk2168_read_s_reg(port,WK2XXX_RFCNT);
- //printf("rfcnt=0x%x.\n",rfcnt);
- /*判断fifo中数据个数*/
- if(fsr& WK2XXX_RDAT)
- {
- if(!(rfcnt2>=rfcnt))
- {
- rfcnt=rfcnt2;
- }
- len=(rfcnt==0)?256:rfcnt;
- }
- #if 1
- wk2168_read_s_fifo(port,recbuf,len);
- #else
- for(n=0;n<len;n++)
- *(recbuf+n)=wk2168_read_s_reg(port,WK2XXX_FDAT);
- #endif
- return len;
- }
- else
- {
- len=0;
- return len;
- }
- }
- /**************************wk2168_set_rs485*******************************************************/
- //函数功能:设置子串口RS485的收发转换函数,使用RTS引脚控制485电平转换芯片的收发
- // port:子串口号
- //
- //注意:只有WK2168/WK2204支持该功能
- /**************************wk2168_set_rs485*******************************************************/
- void wk2168_set_rs485(u8 port)
- {
- wk2168_write_s_reg(port,WK2XXX_RS485,0x02);//
- //wk2168_write_s_reg(port,WK2XXX_RS485,0x03);//
- wk2168_write_s_reg(port,WK2XXX_SPAGE,1);//切换到page1
- wk2168_write_s_reg(port,WK2XXX_RTSDLY,0x01);
- wk2168_write_s_reg(port,WK2XXX_SPAGE,0);//切换到page0
- }
- /**************************wk2168_rts_cts*******************************************************/
- //函数功能:硬件自动流量控制,需要子设备的支持
- // port:子串口号
- //
- //注意:只有WK2168/WK2204支持该功能
- /**************************wk2168_rts_cts*******************************************************/
- void wk2168_rts_cts(u8 port)
- {
- wk2168_write_s_reg(port,WK2XXX_FWCR,0x30);//
- wk2168_write_s_reg(port,WK2XXX_SPAGE,1);//切换到page1
- wk2168_write_s_reg(port,WK2XXX_FWTH,0XF0);//停止接收触点
- wk2168_write_s_reg(port,WK2XXX_FWTL,0X20);//继续接收触点
- wk2168_write_s_reg(port,WK2XXX_SPAGE,0);//切换到page0
- }
|
.png) STMCU小助手
发布时间:2022-4-20 20:34
STMCU小助手
发布时间:2022-4-20 20:34
 微信公众号
微信公众号
 手机版
手机版