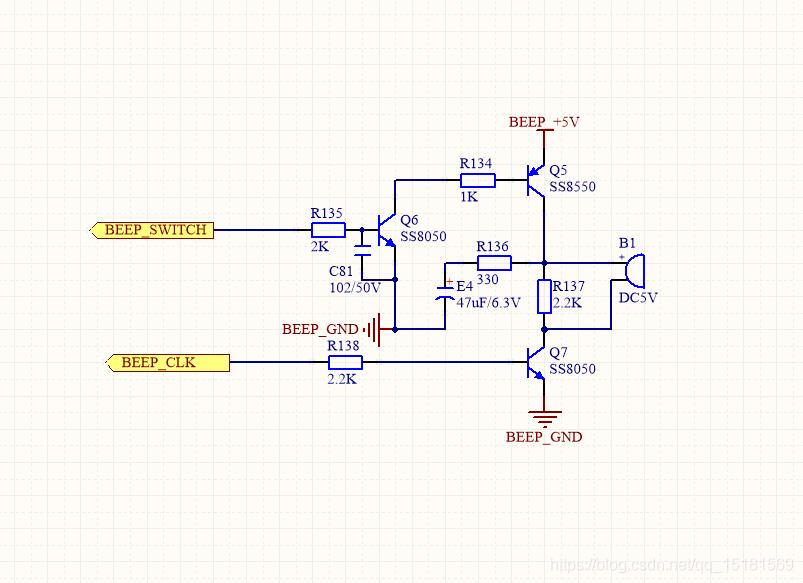
一、原理图

一、驱动代码
- #include "beep.h"
- void beep_init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB端口时钟
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //BEEP-->PB.8 端口配置
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度为50MHz
- GPIO_Init(GPIOB, &GPIO_InitStructure); //根据参数初始化GPIOB.8
- GPIO_ResetBits(GPIOB,GPIO_Pin_8);//输出0,关闭蜂鸣器输出
- }
- void beep_pwm_Init(u16 arr,u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器3时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
-
- // GPIO_PinRemapConfig(GPIO_PartialRemap_TIM4, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
- //设置该引脚为复用输出功能,输出TIM4 CH2的PWM脉冲波形 GPIOB.5
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //TIM_CH2
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
- //初始化TIM4
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
- //初始化TIM3 Channel2 PWM模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
- TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
- TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
- TIM_Cmd(TIM4, ENABLE); //使能TIM3
-
- }
- /*******************************************************************************
- k07样板 2 2.2 2.4
- db_pwm 69 65 62 59 56 54 50 43 41
- fxx 1.8k 1.9k 2.0k 2.1k 2.2k 2.3k 2.47K 2.86K 3K
- *******************************************************************************/
- /*******************************************************************************
- k07样板 2 2.46 3
- db_pwm 69 65 62 59 56 54 50 43 41
- fxx 1.8k 1.9k 2.0k 2.1k 2.2k 2.3k 2.47K 2.86K 3K
- *******************************************************************************/
- #define F1 486 //2.057 KHZ
- #define F1PSC 71 //2.057 KHZ
- #define F2 442 //2.257 KHZ
- #define F2PSC 71 //2.257 KHZ
- #define F3 413 //2.415 KHZ
- #define F3PSC 71 //2.415 KHZ
- #define F4 464 //2.15 KHZ
- #define F4PSC 71 //2.15 KHZ
- u16 const db_table_10 [6] = { F1, F1, F2, F2, F3, F3, }; //底 嗒 帝 开机频率
- u16 const db_table_20 [6] = { 3, 7, 3, 7, 9, 35, }; //每个频率所用的时间10ms单位
- u16 const db_table_psc0 [6] = { F1PSC,F1PSC, F2PSC, F2PSC, F3PSC, F3PSC, }; //每个频率所用的时间10ms单位
- u16 const db_table_11 [6] = { F3, F3, F2, F2, F1, F1, }; //帝 嗒 底 关机频率
- u16 const db_table_21 [6] = { 3, 7, 3, 7, 9, 35, }; //每个频率所用的时间10ms单位
- u16 const db_table_psc1 [6] = { F3PSC, F3PSC, F2PSC, F2PSC, F1PSC, F1PSC, }; //每个频率所用的时间10ms单位
- u16 const db_table_12 [2] = { F4, F4, }; //帝 按键频率
- u16 const db_table_22 [2] = { 8, 35, }; //每个频率所用的时间10ms单位
- u16 const db_table_psc2 [2] = { F4PSC, F4PSC, }; //每个频率所用的时间10ms单位
- u16 const db_table_13 [4] = { F3, F3, F2, F2, }; //底 嗒 上电模式频率
- u16 const db_table_23 [4] = { 3, 20, 7, 60, }; //每个频率所用的时间10ms单位
- u16 const db_table_psc3 [4] = { F3PSC, F3PSC, F2PSC, F2PSC, }; //每个频率所用的时间10ms单位
- u16 const db_table_14 [16] = { F3, F3, F3, F3, F3, F3, F3, F3, F3, F3, F3, F3, F3, F3, F3, F3, }; //测试模式 加速模式
- u16 const db_table_24 [16] = { 3, 18, 3, 18, 3, 18, 3, 18, 3, 18, 3, 18, 3, 18, 3, 18, }; //每个频率所用的时间10ms单位
- u16 const db_table_psc4 [16] = { F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, F3PSC, }; //每个频率所用的时间10ms单位
- u8 const size_table1x []=
- {
- (sizeof (db_table_10)) / (sizeof (db_table_10[0])), //求数组字节总数
- (sizeof (db_table_11)) / (sizeof (db_table_11[0])),
- (sizeof (db_table_12)) / (sizeof (db_table_12[0])),
- (sizeof (db_table_13)) / (sizeof (db_table_13[0])),
- (sizeof (db_table_14)) / (sizeof (db_table_14[0])),
- };
- /******************************************************************************/
- //================================================
- // 使能蜂鸣器函数
- //================================================
- u16
- buz_musc_fz, //赋数组的频率
- buz_fz_timer, //赋数组每个频率的时间
- buz_kong_timer; //防止响蜂鸣超时
- u8
- buz_musc_type, //选择使用蜂鸣类型 0=开机音 1=关机音 2=按键音 3=上电音 4=测试音
- buz_musc_num, //决定选择数组的第几位
- buz_musc_len, //赋数组字节总位数
- buz_musc_read_type; // 蜂鸣类型 1=开机声 2=关机声 3=按键声 4=上电声 5=加速测试声
- u8 F_buz_start,buzzer_flag;
- u16 timerPsc;
- void start_musc (u8 _musc_nm)
- {
- buz_musc_read_type = 0;
-
- buz_musc_fz = 0; // 所有变量清0
- buz_fz_timer = 0;
- buz_musc_type = 0;
- buz_musc_num = 0;
- buz_musc_len = 0;
- buzzer_flag = 0;
-
-
- buz_musc_type = _musc_nm; // 蜂鸣声音的类型
- if (buz_musc_type > 4) { F_buz_start = 0;buz_musc_type = 0; } // 不使能蜂鸣函数
- else { F_buz_start = 1; } // 开始使能蜂鸣函数
-
- close_beep(); // 关闭蜂鸣器电源脚输出
- disable_beep_pwm(); // 关闭蜂鸣器PWM输出
- buz_kong_timer = 0; // 响蜂鸣超时清0
- }
- //================================================
- // 使能蜂鸣器函数
- //================================================
- void musc_scan (void)
- {
- //=========================================================== 开始
- if (F_buz_start)
- {
- //======================================================== 无蜂鸣时间
- if (buz_fz_timer == 0)
- {
- switch (buz_musc_type) //蜂鸣声音的类型
- {
- case 0:
- buz_musc_fz = db_table_10 [buz_musc_num]; //赋频率
- buz_fz_timer = db_table_20 [buz_musc_num]; //赋频率所需的时间
- timerPsc=db_table_psc0[buz_musc_num];
- break;
- case 1:
- buz_musc_fz = db_table_11 [buz_musc_num];
- buz_fz_timer = db_table_21 [buz_musc_num];
- timerPsc=db_table_psc1[buz_musc_num];
- break;
- case 2:
- buz_musc_fz = db_table_12 [buz_musc_num];
- buz_fz_timer = db_table_22 [buz_musc_num];
- timerPsc=db_table_psc2[buz_musc_num];
- break;
- case 3:
- buz_musc_fz = db_table_13 [buz_musc_num];
- buz_fz_timer = db_table_23 [buz_musc_num];
- timerPsc=db_table_psc3[buz_musc_num];
- break;
- case 4:
- buz_musc_fz = db_table_14 [buz_musc_num];
- buz_fz_timer = db_table_24 [buz_musc_num];
- timerPsc=db_table_psc4[buz_musc_num];
- break;
- }
- //装载 pwm1蜂鸣器 周期与占空比
-
- beep_pwm_Init(buz_musc_fz,timerPsc);
- TIM_SetCompare2(TIM4, buz_musc_fz/2);
- // enable_beep_pwm();
-
-
- if (buz_musc_num & 0x01) { close_beep(); } //数组单数就关闭蜂鸣电源脚
- else { open_beep(); } //数组双数就打开蜂鸣电源脚
- buz_musc_len = size_table1x [buz_musc_type]; //计算数组的总字节数
- }
- //======================================================== 无蜂鸣时间 end
-
- //======================================================== 有蜂鸣时间
- if (buz_fz_timer)
- {
- buz_fz_timer--; //每个蜂鸣频率的时间减减
- if (buz_fz_timer == 0)
- {
- buz_musc_num++;
- if (buz_musc_num >= buz_musc_len) //与数组字节相等就结束
- {
- start_musc (5); // 其它关闭蜂鸣PWM及变量清0
- }
- }
- }
- //======================================================= 有蜂鸣时间 end
- }
- else
- {
- close_beep(); // 关闭蜂鸣器电源脚输出
- disable_beep_pwm(); // 关闭蜂鸣器PWM输出
- }
- //===========================================================结束
- }
- //================================================
- // 扫描使能蜂鸣器函数
- //================================================
- void musc_select_num_scan (void)
- {
- switch (buz_musc_read_type)
- {
- case 1: start_musc (0); break; // 开机蜂鸣
- case 2: start_musc (1); break; // 关机蜂鸣
- case 3: start_musc (2); break; // 按键蜂鸣
- case 4: start_musc (3); break; // 上电蜂鸣
- case 5: start_musc (4); break; // 加速蜂鸣
- default:
- if (F_buz_start)
- {
- if (++buz_kong_timer > 1000) // 如果响蜂鸣超过了10sec
- {
- start_musc (5); // 其它关闭蜂鸣PWM及变量清0
- }
- }
- else { buz_kong_timer = 0; }
- break;
- }
- }
主函数中调用
- int main(void)
- {
- u8 i,led=0x00;
- delay_init();
- program_led_init();
- can_led_init();
- rs485_led_init();
- beep_init();
- while(1)
- {
- i++;
- if(i>=100)
- {
- i=0;
- led=~led;
- buz_musc_read_type=1;
- program_led_data(0x00,led-0xf0,0x00);
- }
-
- musc_select_num_scan (); // 蜂鸣
- musc_scan ();
- delay_ms(10);
- }
- }
|
.png) STMCU小助手
发布时间:2022-4-21 21:31
STMCU小助手
发布时间:2022-4-21 21:31
 微信公众号
微信公众号
 手机版
手机版