.png) STMCU小助手
发布时间:2022-4-28 21:16
STMCU小助手
发布时间:2022-4-28 21:16
|
16.1 关于I2C 16.1.1 I2C协议 I²C(Inter-Integrated Circuit),常读作“I方C”,它是一种多主从架构串行通信总线。在1980年由飞利浦公司设计,用于让主板、嵌入式系统或手机连接低速周边设备。如今在嵌入式领域是非常常见通信协议,常用于MPU/MCU与外部设备连接通信、数据传输。 I²C由两条线组成,一条双向串行数据线SDA,一条串行时钟线SCL。每个连接到总线的设备都有一个独立的地址,主机可以通过该地址来访问不同设备。因为I²C协议比较简单,常常用GPIO来模拟I²C时序,这种方法称为模拟I²C。如果使用MCU的I²C控制器,设置好I²C控制器, I²C控制器就自动实现协议时序,这种方式称为硬件I²C。因为I²C设备的速率比较低,通常两种方式都可以,模拟I²C方便移植,硬件I²C工作效率相对较高。 关于I²C协议,通过下面例子进行一个形象的比喻方便大家理解,如图 16.1.1 所示,老师(MCU)将球(数据)传给众多学生中的一个(众多外设设备中的一个)。 {~24NWNX2}2FC_EMNY.png")
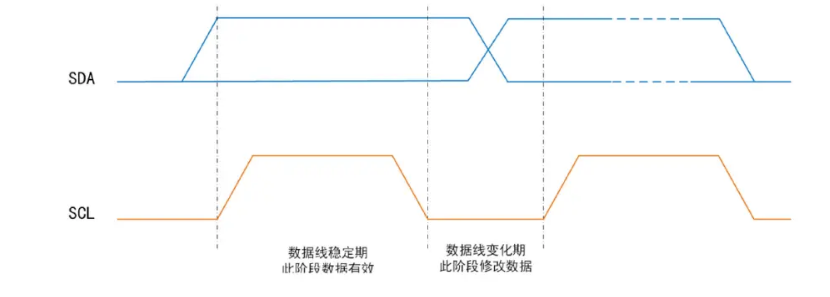
图 16.1.1 I²C协议比喻 首先老师将球踢给某学生,即主机发送数据给从机,步骤如下: 1) 老师:开始了(start); 2) 老师:A!我要发球给你!(地址/方向); 3) 学生A:到!(回应); 4) 老师把球发出去(传输); 5) A收到球之后,应该告诉老师一声(回应); 6) 老师:结束(停止); 接着老师让学生把球传给自己,即从机发送数据给主机,步骤如下: 1) 老师:开始了(start); 2) 老师:B!把球发给我!(地址/方向); 3) 学生B:到! 4) B把球发给老师(传输); 5) 老师收到球之后,给B说一声,表示收到球了(回应); 6) 老师:结束(停止)。 从上面的例子可知,都是老师(主机)主导传球,按照规范的流程(通信协议),以保证传球的准确性,收发球的流程总结如下: ① 老师说开始了,表示开始信号(start); ② 老师提醒某个学生要发球,表示发送地址和方向(address/read/write); ③ 该学生回应老师(ack); ④ 老师发球/接球,表示数据的传输; ⑤ 收到球要回应:回应信号(ACK); ⑥ 老师说结束,表示IIC传输结束(P)。 以上就是I²C的传输协议,如果是软件模拟I²C,需要依次实现每个步骤。因此,还需要知道每一步的具体细节,比如什么时候的数据有效,开始信号怎么表示。 数据有效性 I²C由两条线组成,一条双向串行数据线SDA,一条串行时钟线SCL。SDA线上的数据必须在时钟的高电平周期保持稳定,数据线的高或低电平状态只有在 SCL 线的时钟信号是低电平时才能改变。换言之,SCL为高电平时表示有效数据,SDA为高电平表示“1”,低电平表示“0”;SCL为低电平时表示无效数据,此时SDA会进行电平切换,为下次数据表示做准备。数据有效性示意图如图 16.1.2 所示。 
图 16.1.2 数据有效性 开始信号和结束信号 I²C起始信号(S):当SCL高电平时,SDA由高电平向低电平转换; I²C停止信号(P):当SCL高电平时,SDA由低电平向高电平转换; ![@_@TMPRPONWV898}]){MSEL.png](data/attachment/forum/202204/28/211811rgegakeww9gkckk9.png "@_@TMPRPONWV898}]){MSEL.png")
图 16.1.3 开始信号和结束信号 应答信号 I²C每次传输的8位数据,每次传输后需要从机反馈一个应答位,以确认从机是否正常接收了数据。当主机发送了8位数据后,会再产生一个时钟,此时主机放开SDA的控制,读取SDA电平,在上拉电阻的影响下,此时SDA默认为高,必须从机拉低,以确认收到数据。 ![A1QJGFLS]1QQCOUFAL{Z~6Q.png](data/attachment/forum/202204/28/211811ti44zidvde4vee4p.png "A1QJGFLS]1QQCOUFAL{Z~6Q.png")
图 16.1.4 数据传输格式和应答信号 完整传输流程 I²C完整传输流程如下: ① SDA和SCL开始都为高,然后主机将SDA拉低,表示开始信号; ② 在接下来的8个时间周期里,主机控制SDA的高低,发送从机地址。其中第8位如果为0,表示接下来是写操作,即主机传输数据给从机;如果为1,表示接下来是读操作,即从机传输数据给主机;另外,数据传输是从最高位到最低位,因此传输方式为MSB(Most Significant Bit)。 ③ 总线中对应从机地址的设备,发出应答信号; ④ 在接下来的8个时间周期里,如果是写操作,则主机控制SDA的高低;如果是读操作,则从机控制SDA的高低; ⑤ 每次传输完成,接收数据的设备,都发出应答信号; ⑥ 最后,在SCL为高时,主机由低拉高SDA,表示停止信号,整个传输结束; 
图 16.1.5 I2C传输时序 16.1.2 EEPROM介绍 EEPROM的全称是“电可擦除可编程只读存储器”,即Electrically Erasable Programmable Read-Only Memory。通常用于存放用户配置信息数据,比如在开发板首次运行时,需要屏幕校准,校准后的配置信息就可以保存在EEPROM里,开发板断电后配置信息不丢失,下次启动,开发板自动读取EEPROM的校准配置信息,就不需要重新校准。 EEPROM和Flash的本质上是一样的,Flash包括MCU内部的Flash和外部扩展的Flash,本开发板就有一个SPI接口的外部Flash(W25Q64),在后面SPI接口再讲解。从功能上,Flash通常存放运行代码,运行过程中不会修改,而EEPROM存放用户数据,可能会反复修改。从结构上,Flash按扇区操作,EEPROM通常按字节操作。两者区别这里不再过多赘述,读者理解EEPROM在嵌入式中扮演的角色即可。 结构组成 EEPROM类型众多,其中比较常见是AT24Cxx系列,从命名上看,AT24Cxx中xx的单位是K Bit,如AT24C08,其存储容量为8K Bit。本开发板上的EEPROM型号为AT24C02,其存储容量为2K Bit,2*1024=2048 Bit。 对于AT24C01/02,每页大小为8 Byte,对于AT24C04/08/16,每页大小为16 Byte。如图 16.1.6 所示,AT24C02由32页(Page)组成,每一页由8个字节(Byte)组成,每个Byte由8位(Bit)组成,Bit为最小存储单位,存放1个0或1。 
图 16.1.6 AT24C02结构示意图 设备地址 I²C设备都会有一个设备地址,不同容量的AT24C02,设备地址定义会有所差异,由芯片数据手册《AT24Cxx.pdf》可知,如图 16.1.7 所示。 ![4RWIVKT7H}W0DLRQ]2LMG54.png](data/attachment/forum/202204/28/211812gxnjcepncje5pqpj.png "4RWIVKT7H}W0DLRQ]2LMG54.png")
图 16.1.7 AT24Cxx设备地址定义 AT24C02的容量为2K,对应上图中的第一行,高四位固定为“1010”,中间三位由A2、A1、A0引脚的电平决定,比如A2~0引脚全接地,则值为“000”,最后的最低位为读写位,0代表写命令,1代表读命令。 A2、A1、A0引脚电平需要由原理图决定,假设全接电源地,则如果需要向AT24C02写数据,则发送地址“1010 0000”,如果需要向AT24C02读数据,则发送地址“1010 0001”。 假设开发板有多个AT24C02挂在同一I²C总线上,通过这个规则,只需设计电路时,让A2、A1、A0引脚电平不同,即可区分两个AT24C02。 对于容量再大一点的AT24Cxx系列,比如AT24C04,器件地址由A2、A1引脚决定,数据空间有P0决定。比如对AT24C04的0~2K空间操作,则P0为0,对2K~4K空间操作,则P0为1。 写AT24Cxx AT24Cxx支持字节写模式和页写模式。字节写模式是一个地址一个数据的写;页写模式是连续写数据,一个地址多个数据的写,但是页写模式不能自动跨页,如果超出一页长度,超出的数据会覆盖原先写入的数据。 如图 16.1.8 所示,为AT24Cxx字节写模式的时序,在MCU发出开始信号(Start)后,发出8 Bit的设备地址信息(图中读写位为低电平,即写数据),待收到AT24Cxx应答信号后,再发出要写的数据地址,再次等待AT24Cxx应答,最后发出8 Bit数据写数据,待AT24Cxx应答后,发出停止信号(Stop),完成一次单字节写数据。 
图 16.1.8 AT24Cxx字节写模式时序 AT24C02容量为2K,因此数据地址范围为0x00~0xFF,即0~255,每个数据地址每次写1Byte,即8bit,也就刚好256*8=2048Bit。对于1K容量的产品,数据地址范围为0x00~0x7F,最高位不会用到,因此图中数据地址的最高位为“*”,意思是对于1K容量的产品,该位无需关心。 ![NG)F_2SKW]N[PG}463NL7E1.png](data/attachment/forum/202204/28/211813qla3l33kzry5yfk3.png "NG)F_2SKW]N[PG}463NL7E1.png")
图 16.1.9 单字节写模流程图 图 16.1.10 为AT24Cxx的页写模式时序,与字节写模式的差异在于,不是只发送1Byte数据,而是任意多个。需要注意,该模式不能跨页写,遇到跨页时,需要重新发送完整的时序。 
图 16.1.10 AT24Cxx页写模式时序 值得一提的是,《AT24Cxx.pdf》里提到每次写完之后,再到下次写之前,需要间隔5ms时间,以确保上次写操作在芯片内部完成,如图 16.1.11 所示。 ![P}]BU9C9_66N9CGWW[C3JNQ.png](data/attachment/forum/202204/28/211813jdd09k5n6jaduskg.png "P}]BU9C9_66N9CGWW[C3JNQ.png")
图 16.1.11 AT24Cxx写间隔 读AT24Cxx AT24Cxx支持当前地址读模式、随机地址读模式和顺序读模式。当前地址读模式就是在上一次读/写操作之后的最后位置,继续读出数据,比如上次读/写在地址n,接下来可以直接从n+1处读出数据;随机地址读模式是指定数据地址,然后读出数据;顺序读模式是连续读出多个数据。 在当前地址读模式下,无需发送数据地址,数据地址为上一次读/写操作之后的位置,时序如图 16.1.12 所示,注意在结尾,主机接收数据后,无需产生应答信号。 ![YJHMPGT5ML]A4F3%(V%J%5K.png](data/attachment/forum/202204/28/211813k58ninnsmo1zn53k.png "YJHMPGT5ML]A4F3%(V%J%5K.png")
图 16.1.12 AT24Cxx当前地址读模式 在随机地址读模式下,需要先发送设备地址,待读的数据地址,接着再重新发出开始信号,设备地址,读出数据,时序如图 16.1.13 所示。 ![[CN}L{Z4H[A(]91HNQ)PGX4.png](data/attachment/forum/202204/28/211813fb9mxhz4eh7x9mrz.png "[CN}L{Z4H[A(]91HNQ)PGX4.png")
图 16.1.13 AT24Cxx随机地址读模式 在顺序读模式下,需要先从当前地址读模式或随机地址读模式启动,随后便可连续读多个数据,时序如图 16.1.14 所示 ![]4$_$RES6Z_HOU4MF(0$H%H.png](data/attachment/forum/202204/28/211813q8cjxzj8xz5dsmj6.png "]4$_$RES6Z_HOU4MF(0$H%H.png")
图 16.1.14 AT24Cxx顺序读模式 16.2 硬件设计 如图 16.2.1 为开发板EEPROM部分的原理图,U6为AT24C02芯片,它的A0、A1、A2都接地,因此该设备地址为“1010 000X”,当读该设备时,X为1,写该设备时,X为0。 U4的7脚为写保护引脚(Write Protect,WP),当该引脚为高,则禁止写AT24C02,这里直接拉低WP,任何时候都可直接写AT24C02。 此外,I2C的两个脚SCL和SDA都进行了上拉处理,从而保证I2C总线空闲时,两根线都必须为高电平。如果没有上拉,在主机发送完数据后,放开SDA,此时SDA的电平状态不确定,可能为高,也可能为低,无法确定是从机拉低给出应答信号。 结合原理图可知,PB6作为了I2C1的SCL,PB7作为了I2C1的SDA。 ~U.png")
图 16.2.1 EEPROM模块原理图 16.3 软件设计 16.3.1 软件设计思路 实验目的:本实验通过GPIO模拟I2C总线时序,对EEPROM设备AT24C02进行读写操作。 1) 引脚初始化:GPIO端口时钟使能、GPIO引脚设置为输入/输出模式(PB6、PB7); 2) 封装I2C每个环节的时序函数:起始信号、响应信号、读写数据、停止信号; 3) 使用I2C协议函数,实现对AT24C02的读写; 4) 主函数,每按一次按键,写一次AT24C02,接着读出来验证是否和写的数据一致; 本实验配套代码位于“5_程序源码\8_通信—模拟I2C\”。 16.3.2 软件设计讲解 1) GPIO选择与接口定义 首先定义SCL和SDA引脚,引脚的高低电平宏定义,如代码段 16.3.1 所示。 代码段 16.3.1 模拟I2C引脚相关定义(driver_i2c.h)
接着将两个GPIO引脚初始化,使能引脚时钟,先默认设置为输出模式。SCL引脚为时钟信号,始终为输出模式,SDA引脚为数据引脚,可能输出或者输入,因此还需要编写函数实现输入、输出的切换,如代码段 16.3.2 所示。 代码段 16.3.2 I2C引脚初始化(driver_i2c.c)
2) I2C时序函数 开始信号/结束信号 参考前面图 16.1.3 所示的开始信号和结束信号编写程序。对于开始信号,首先将SDA和SCL都拉高,随后SDA拉低,再SCL拉低。对于结束信号,首先拉低SDA,拉高SCL,再拉低SDA,代码如代码段 16.3.3 所示。 代码段 16.3.3 I2C开始信号和结束信号(driver_i2c.c)
应答信号/非应答信号/等待应答信号 参考前面图 16.1.4 所示,编译应答信号,如代码段 16.3.4 所示。 代码段 16.3.4 应答/非应答/等待应答信号(driver_i2c.c)
8~23行:应答信号,在一个SDA时钟周期里,将SCL拉低; 32~47行:非应答信号,在一个SDA时钟周期里,将SCL拉高; 56~82行:等待应答信号,拉高SDA后放开SDA,读取SDA是否被拉低,如果拉低返回0,否则返回1; 发送/接收函数 最后还剩发送/接收函数,如代码段 16.3.5 所示。对于发送函数,控制SDA产生8个时钟周期,每个时钟周期里控制SDA高低电平发送1位数据。对于接收函数,控制SDA产生8个时钟周期,每个时钟周期里读取SDA高低电平接收1位数据。 代码段 16.3.5 发送/接收函数(driver_i2c.c)
14~31行:循环8次,每次循环: 16行:先拉低SCL; 19~26行:将输入的数据data与0x08且运算,得到最高位的值,从而控制SDA输出对应的高、低电平; 27行:将data左移一位,得到次高位; 29行:拉高SCL,让SDA处于稳定期,从设备即可获取SDA的值; 35行:等待从设备的应答信号; 53~65行:循环8次,每次循环: 55行:先拉高SCL,此时认为从设备控制SDA电平,处于稳定期; 58行:将data左移1位,以确保收到数据按最高位在前存放; 59~62行:读取SDA电平,如果为高,保存到data当前最低位,否则data最低位默认为0; 63行:SCL拉低,此时从设备继续控制SDA电平变化 66~74行:根据传入的参数,决定是否发送应答信号; 整个I2C协议函数中,经常用到“ I2C_Delay()”来实现SCL时钟周期。对于AT24Cxx,由其芯片手册可知,时钟脉冲宽度(Clock Pulse Width)需要大于5us,也就是SCL如果刚变为高电平,需要等待至少5us才能变为低电平,因此定义“ I2C_Delay()”为5us以上即可。
这里的“us_timer_delay()”可以由定时器提供,也可以使用循环提供,前者精度更高,效果更好。定时器的介绍在后面章节,本章不作分析,延时函数的两者方式如代码段 16.3.6 所示。 代码段 16.3.6 延时函数的实现(driver_timer.c)
3) AT24C02读写函数 编写好I2C协议函数后,参考AT24C02手册编写读写数据函数,如代码段 16.3.7 所示。 代码段 16.3.7 读写AT24C02一字节数据(driver_eeprom.c)
参加前面图 16.2.1 和图 16.1.13 所示的介绍时序,编写AT24C02一字节读写程序。 9~33行:写AT24C02一字节数据; 12行:发送I2C开始信号; 15行:发送AT24C02的设备地址,最后一位表示写操作; 18~26行:根据EEPROM型号,调用不同的数据地址长度设置函数(AT24C01/02为8位,AT24C04/08/16为16位); 29行:发送数据; 32行:发送I2C停止信号; 43~73行:读AT24C02一字节数据; 46行:发送I2C开始信号; 49行:发送AT24C02的设备地址,最后一位表示写操作(接下来要写数据地址); 52~60行:根据EEPROM型号,调用不同的数据地址长度设置函数(AT24C01/02为8位,AT24C04/08/16为16位); 63行:再次发送I2C开始信号; 66行:发送AT24C02的设备地址,最后一位表示读操作; 69行:读取AT24C02数据,且无需ACK; 72行:发送I2C停止信号; 实现了对AT24C02单字节的读写,还需要实现多字节的读写。多字节读写可以通过AT24Cxx的页写模式和顺序读模式,实现多个数据的连续读写。在页写模式时,需要程序上设置,不能跨页写,这里简单处理,直接多次调用前面的单次读写即可,如代码段 16.3.8 所示。 代码段 16.3.8 读写AT24C02多字节数据(driver_eeprom.c)
需要注意的是,AT24Cxx每次写操作后,有一个写间隔,需要间隔5ms以上,因此在写多个字节时,每次写完都需要延时5ms以上。 4) 主函数控制逻辑 在主函数里,每按一下按键,调用“EEPROM_Write_Nbytes()”对AT24C02写一串数据,再调用“EEPROM_Read_Nbytes()”读出该数据,如代码段 16.3.9 所示。 代码段 16.3.9 主函数控制逻辑(main.c)
16.4 实验效果 本实验对应配套资料的“5_程序源码\8_通信—模拟I2C\”。打开工程后,编译,下载,按下按键KEY,即可看到串口如图 16.4.1 所示。 
图 16.4.1 模拟I2C读写AT24C02数据 |
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版