.png) STMCU小助手
发布时间:2022-5-12 19:10
STMCU小助手
发布时间:2022-5-12 19:10
|
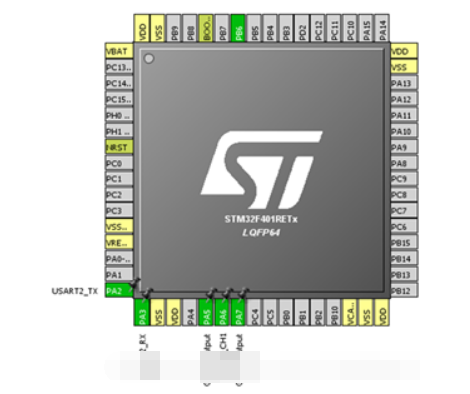
1. 实验原理 超声波传感器采用的是HC-SR04,具有VCC、GND、Trig、Echo四个引脚,其使用方法为:将Trig 设置为高电平并保持至少10us,传感器将发出 8 个脉冲的声波。对于声波产生回声所需的整个时间内, Echo 为高电平。测量该高电平时间即可知经过的时间,则可计算障碍物的距离。 测量Echo 为高电平的时间是利用STM32的通用定时器进行输入捕获,测量得到的高电平时间通过公式:距离 = Thigh *340/2 (m) ,其中Thigh 单位为秒(s), 340米/秒(m/s)为声速。 2. 设计分析 由STM32F4xx数据手册可知,所采用的板子有TM2-TM5四个通用定时器,该设计中采用TIM3定时器(16位)。它具有输入捕获模式、输出比较模式、单脉冲模式等多种功能模式,其中,输入捕获模式可以设置捕获上升沿或下降沿对输入信号进行捕获,发生捕获事件时,当前计数值可被获得,如果已使能中断则可触发中断。本设计采用输入捕获模式对Echo信号进行捕获与计时。 根据HC-SR04数据手册得知,该超声波传感器射程为2cm-4m,代入距离公式中可得Thigh的范围大致为0.0235~ 0.0002857s,即1/Thigh的范围在42.5-8500Hz之间,故选择计数器时钟1MHz即可满足要求。 3. 设计过程 1. 用 STM32CubeMX配置对应引脚生成项目代码。 1)配置引脚 在左端设置TIM3为内部时钟输入,并使能通道1,可以看到右边PA6变为绿色,在电路图中寻找PA6对应的外部引脚编号为D12,该引脚将连接超声波传感器的Echo引脚,为方便器件连接,选择D12相邻的外部引脚D11作为输出与Trig连接,故配置D11相应的引脚PA7为GPIO输出。引脚配置图与电路图见下方所示。 R.png")
图1 引脚配置图 
图2 引脚对应电路图 2)配置计时器TIM3参数 板子没有焊外部晶振,故时钟源选用HIS,定时器时钟频率为16MHz。如下图所示。 
图3 时钟配置图 定时器TIM3参数配置如下图所示,预分频系数位15,即TIM3定时器最后频率为16 MHz/(15+1)=1MHz;最大计数值为0xffff(65535),并在NVIC中开启中断。 
图4 TIM3参数配置图 3)生成项目代码 2. 用Keil打开生成的项目代码,增加处理逻辑代码 1)首先定义捕获次数capture_cnt,捕获计数值capture_value1,capture_value2,及高电平时间hightime与距离distance。 
2)查看HAL库中关于TIM的函数,在主函数的while 中添加以下代码。根据捕获次数进行不同操作。当捕获次数为0时,使能TIM3中断模式的输入捕获,并设置其触发捕获方式为上升沿触发;当发送捕获时,进入捕获中断函数(其中中断函数为自动生成的,里面调用了触发回调函数,故可直接在回调函数中处理),在捕获回调函数中获取当前计数值赋给capture_value1,再更改捕获方式为下降沿触发;当再次发生捕获时,将当前计数值赋给capture_value2,然后停止输入捕获。在主函数中,根据capture_value1和capture_value2直接的差值即可得到时间,再代入距离公式便求得距离。 GB.png")
![Z11X]04YF3`P62[E8YYPBIP.png](data/attachment/forum/202205/12/191127nkenxwxn0vbkppgb.png "Z11X]04YF3`P62[E8YYPBIP.png")
3)在主函数的while循环中打开串口接收,判断接收到的数据为00时,进行距离测量:给超声波模块的Trig引脚一个高电平。 
|
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版