.png) STMCU小助手
发布时间:2022-5-16 11:26
STMCU小助手
发布时间:2022-5-16 11:26
|
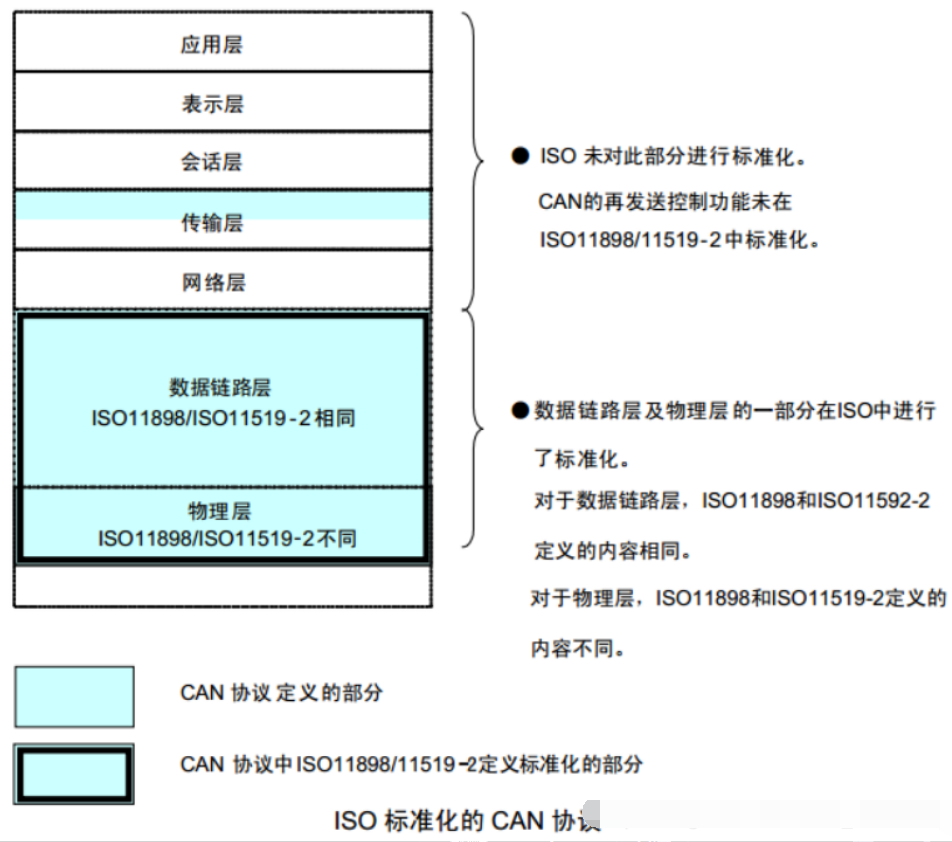
1、什么是CAN CAN是Controller Area Network 的缩写(简称称CAN),是ISO国际标准化的串行通信协议。由德国电气商博世公司在1986 年率先提出。此后,CAN 通过ISO11898 及ISO11519 进行了标准化。现在在欧洲已是汽车网络的标准协议。ISO11898是针对通信速率为125Kbps~1Mbps的高速通信标准,而ISO11519-2是针对通信速率为125Kbps以下的低速通信标准。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。 CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。具有很高的可靠性,广泛应用于:汽车电子、工业自动化、船舶、医疗设备、工业设备等方面。 R$@(AS~3Y~ABOSVG`XZ(5.png")
2、CAN协议的特点 ①多主控制。 ②系统柔软性。 ③ 速度快,距离远。 ④ 具有错误检测、错误通知和错误恢复功能。 ⑤ 故障封闭功能。 ⑥连接节点多。 3、ISO11898标准下的物理层特征 CAN 控制器根据CAN_L和CAN_H上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。 显性电平对应逻辑:0,CAN_H和CAN_L之差为2.5V左右。 隐性电平对应逻辑:1,CAN_H和CAN_L之差为0V。 显性电平具有优先权,只要有一个单元输出显性电平,总线上即为显性电平。而隐形电平则具有包容的意味,只有所有的单元都输出隐性电平,总线上才为隐性电平(显性电平比隐性电平更强)。另外,在CAN总线的起止端都有一个120Ω的终端电阻,来做阻抗匹配,以减少回波反射。 
4、CAN 协议的5 种类型帧 
其中,数据帧和遥控帧有标准格式和扩展格式两种格式。 标准格式有11 个位的标识符(ID),扩展格式有29 个位的ID 。 其中,最常用,也是最复杂的是数据帧,接着就看看数据帧: 数据帧一般由 7 个段构成 (1) 帧起始。表示数据帧开始的段。 (2) 仲裁段。表示该帧优先级的段。 (3) 控制段。表示数据的字节数及保留位的段。 (4) 数据段。数据的内容,一帧可发送 0~8 个字节的数据。 (5) CRC 段。检查帧的传输错误的段。 (6) ACK 段。表示确认正常接收的段。 (7) 帧结束。表示数据帧结束的段。 ![~A5_U[81UV8]~5SJIFJF9TG.png](data/attachment/forum/202205/16/112742jbr029gxdzb2gxvr.png "~A5_U[81UV8]~5SJIFJF9TG.png")
4.1、总线仲裁介绍 同时多个单元发送数据时,总线仲裁过程: IDI{7Z@DSA615FA8)E.png")
上图中,单元 1 和单元 2 同时开始向总线发送数据,开始部分他们的数据格式是一样的,故无法区分优先级,直到 T 时刻,单元 1 输出隐性电平,而单元 2 输出显性电平,此时单元 1仲裁失利,立刻转入接收状态工作,不再与单元 2 竞争,而单元 2 则顺利获得总线使用权,继续发送自己的数据。这就实现了仲裁,让连续发送显性电平多的单元获得总线使用权. 规律: 1,总线空闲时,最先发送的单元获得发送优先权,一但发送,其他单元无法抢占。 2,如果有多个单元同时发送,则连续输出显性电平多的单元,具有较高优先级。 4.2、位时序 位速率:由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位一般可以分为如下四段: 同步段(SS) 传播时间段(PTS) 相位缓冲段 1(PBS1) 相位缓冲段 2(PBS2) 这些段又由可称为 Time Quantum(以下称为 Tq)的最小时间单位构成,1 位分为 4 个段,每个段又由若干个 Tq 构成,这称为位时序。 位时间=1/波特率,因此,知道位时间,我们就可以知道波特率1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。通过设定位时序,多个单元可同时采样,也可任意设定采样点。各段的作用和 Tq 数如表所示: 
1 个位的构成如图所示: ![%QR7Z1KPF)9]}7_HZ)]IH78.png](data/attachment/forum/202205/16/112743f117516p7aw1ztn8.png "%QR7Z1KPF)9]}7_HZ)]IH78.png")
上图的采样点,是指读取总线电平,并将读到的电平作为位值的点。位置在 PBS1 结束处。根据这个位时序,我们就可以计算 CAN 通信的波特率了。图中采样时间加大或减少量的最大值就是SJW。 5、STM32 CAN控制器简介 STM32F4 自带的是 bxCAN,即基本扩展 CAN。它支持 CAN 协议 2.0A 和 2.0B。它的设计目标是,以最小的 CPU 负荷来高效处理大量收到的报文。它也支持报文发送的优先级要求(优先级特性可软件配置)。对于安全紧要的应用, bxCAN 提供所有支持时间触发通信模式所需的硬件功能。 STM32F4 的 bxCAN 的主要特点有: ①支持 CAN 协议 2.0A 和 2.0B 主动模式 ②波特率最高达 1Mbps ③支持时间触发通信 ④具有 3 个发送邮箱 ⑤具有 3 级深度的 2 个接收 FIFO ⑥可变的过滤器组(28 个, CAN1 和 CAN2 共享) 16~{@VDJYEVZN9IKG(T%H.png")
5.1、标识符筛选器 CAN的标识符不表示目的地址而是表示发送优先级。接收节点根据标识符的值,来决定是否接收对应消息。 STM32 CAN控制器,提供了28个可配置的筛选器组(F1仅互联型才有28个,其他的只有14个),可降低CPU处理CAN通信的开销。 STM32 CAN控制器每个筛选器组由2个32位寄存器组成(CAN_FxR1和CAN_FxR2,x=0~27)。根据位宽不同,每个筛选器组可提供: ● 1个32位筛选器,包括:STDID[10:0]、EXTID[17:0]、IDE和RTR位 ● 2个16位筛选器,包括:STDID[10:0]、IDE、RTR和EXTID[17:15]位 4.筛选器可配置为:屏蔽位模式和标识符列表模式。 在屏蔽位模式下,标识符寄存器和屏蔽寄存器一起,指定报文标识符的任何一位,应该按照“必须匹配”或“不用关心”处理。 在标识符列表模式下,屏蔽寄存器也被当作标识符寄存器用。因此,不是采用一个标识符加一个屏蔽位的方式,而是使用2个标识符寄存器。接收报文标识符的每一位都必须跟筛选器标识符相同。 
为了过滤出一组标识符,应该设置筛选器组工作在屏蔽位模式。 为了过滤出一个标识符,应该设置过滤器组工作在标识符列表模式。 应用程序不用的筛选器组,应该保持在禁用状态(通过CAN_FA1R设置)。 筛选器组中的每个筛选器,都被编号为(即:筛选器编号)从0开始,到某个最大数值-取决于筛选器组的模式和位宽的设置。 通过CAN_FFA1R的设置,可以将筛选器组关联到FIFO0/FIFO1 5.2、STM32 CAN模式 1)工作模式 ①初始化模式(INRQ=1,SLEEP=0) ②正常模式(INRQ=0,SLEEP=0) ③睡眠模式(SLEEP=1) 2)测试模式 静默模式( LBKM=0,SILM=1 ) 
环回模式( LBKM=1,SILM=0 ) 
环回静默模式(LBKM=1,SILM=1) WACIRR[N.png")
3)调试模式 5.3、STM32 CAN发送流程 CAN发送流程为: 程序选择1个空置的邮箱(TME=1)--->设置标识符(ID),数据长度和发送数据--->设置CAN_TIxR的TXRQ位为1,请求发送--->邮箱挂号(等待成为最高优先级)--->预定发送(等待总线空闲)--->发送--->邮箱空置。 还包含了很多其他处理,终止发送(ABRQ=1)和发送失败处理等 ![]H1Q8B)[T86KV_74XRMXFDP.png](data/attachment/forum/202205/16/112745fb71rb7k7rc2tn4y.png "]H1Q8B)[T86KV_74XRMXFDP.png")
5.4、STM32 CAN接收流程 CAN接收流程为: FIFO空--->收到有效报文--->挂号_1(存入FIFO的一个邮箱,这个由硬件控制,从而节省了 CPU 的处理负荷,简化了软件并保证了数据的一致性)---->收到有效报文---->挂号_2---->收到有效报文---->挂号_3---->收到有效报文à溢出。 CAN收到的有效报文,存储在3级邮箱深度的FIFO中。FIFO接收到的报文数,我们可以通过查询CAN_RFxR的FMP寄存器来得到,只要FMP不为0,我们就可以从FIFO读出收到的报文。 报文FIFO具有锁定功能(由CAN_MCR,RFLM位控制),锁定后,新数据将丢弃,不锁定则新数据将替代老数据 ![Z{NCPU77TQBGI%J$%]XO[XU.png](data/attachment/forum/202205/16/112746wdxexde24dxzdpff.png "Z{NCPU77TQBGI%J$%]XO[XU.png")
5.5、STM32 CAN位时序 STM32F4 把传播时间段和相位缓冲段 1(STM32F4 称之为时间段1)合并了,所以 STM32F4 的 CAN 一个位只有 3 段:同步段(SYNC_SEG)、时间段 1(BS1)和时间段 2(BS2)。 STM32F4 的 BS1 段可以设置为 1~16 个时间单元,刚好等于CAN的传播时间段和相位缓冲段 1 之和。 @KRRV56{DVXE1BBK895T.png")
图中还给出了 CAN 波特率的计算公式,我们只需要知道 BS1 和 BS2 的设置,以及 APB1的时钟频率(一般为 42Mhz),就可以方便的计算出波特率。 比如: STM32F103,设TS1=8、TS2=7、BRP=3,波特率=36000/[(9+8+1)*4]=500Kbps。 STM32F407,设TS1=6、TS2=5、BRP=5,波特率=42000/[(7+6+1)*6]=500Kbps。 6、参考代码
|
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版