.png) STMCU小助手
发布时间:2022-5-24 11:05
STMCU小助手
发布时间:2022-5-24 11:05
|
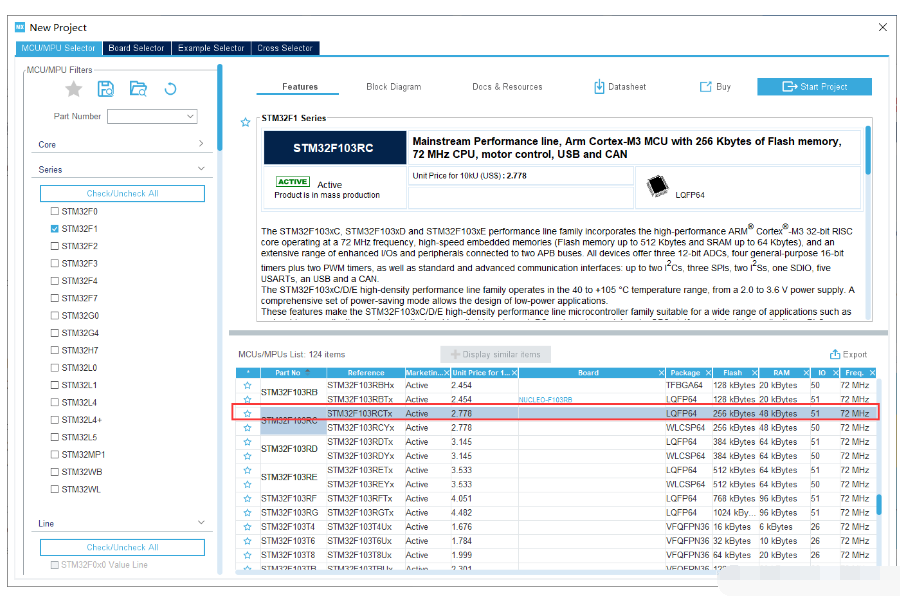
本篇文章我将针对PWM控制电机与编码器读取电机转速的STM32CubeMX配置过程进行详细的讲解,让准备学习HAL库的小伙伴能够更好的理解STM32CubeMX如何配置。 1、硬件准备 (1)所需硬件 芯片:STM32F103RCT6 驱动:电机驱动板或TB6612(电机驱动芯片) 电池:12V Libo电池 电机:带编码器电机 轮子:我用的是麦克纳姆轮 (2)硬件连接: PA8 —— 电机驱动板PWM1 GND —— 电机驱动板PWM2 (这里若要反转则PWM1接地,PWM2接PA8;如果在小车中两者都需接PWM引脚,正转:PWM1给一定占空比,PWM2占空比为0) PA9(USART1_RX) —— 接串口TX PA10(USART1_TX) —— 接串口RX PB6 —— 编码器A PB7 —— 编码器B 2、STM32CubeMX配置: 1.1 所用工具: 芯片:STM32F103RCT6 IDE:MDK-Keil软件 STM32F1xxHAL库 1.2 知识概括: STM32CubeMX创建TIMx、USART例程 Keil软件程序编写 1.3 工程创建 1、芯片选择 芯片:STM32F103RCT6(根据自己的板子来进行选择) 
2、设置RCC 设置高速外部时钟HSE 选择外部时钟源 
3、LED1配置 我使用的板子LED1引脚为PD2,初始电平为高电平,目的是通过观察小灯的亮灭判断是否进入定时器中断 ![$({RM4FPK)]`4S%9ST`Y2IV.png](data/attachment/forum/202205/24/110621lxzb7tt80tpeqv7m.png "$({RM4FPK)]`4S%9ST`Y2IV.png")
4、USART1配置 异步收发,波特率默认:115200 Bit/s ![H)P`$@T]OH)A_H[{)H(6@YF.png](data/attachment/forum/202205/24/110622wwu4cdz19tewwdd4.png "H)P`$@T]OH)A_H[{)H(6@YF.png")
5、PWM配置 使用定时器1通道1和通道4(TIM1_CH1和TIM1_CH4),频率10KHz ~L2RAZ%6.png")
6、定时器中断配置 使用定时器2(TIM2),周期设为10ms,即10ms进一次定时器中断 C%C.png")
打开更新定时器中断 
7、编码器配置 STM32自带编码器配置,使用定时器4(TIM4_CH1和TIM4_CH2),打开更新定时器中断 
8、中断优先级配置 因为编码器中断要发生在定时10ms中断内,故编码器中断的抢占优先级要大于定时10ms ![}_DSEQOI[MC]KJKD5}(][4V.png](data/attachment/forum/202205/24/110624yee9ldeejihdlej7.png "}_DSEQOI[MC]KJKD5}(][4V.png")
9、配置时钟 F1系列芯片系统时钟为72MHzs 
10、项目创建最后步骤 设置项目名称 选择所用IDE [YC.png")
11、输出文件 ②处:复制所用文件的.c和.h ③处:每个功能生产独立的.c和.h文件 
12、创建工程文件 点击GENERATE CODE 创建工程 13、配置下载工具 这里我们需要勾选上下载后直接运行,然后进行一次编译 
3、STM32源代码: (1)下面的代码之前有用过hal库的小伙伴应该都很容易理解,小政就不过多解释,有不懂的地方欢迎在评论区下方提问。在main.c加上:
(2)烧入STM32中,串口展示: ![O`T47Y5J`LF6UMHK{DLRM]G.png](data/attachment/forum/202205/24/110625cxq4h6d6collcxpn.png "O`T47Y5J`LF6UMHK{DLRM]G.png")
(3)实物展示: ![WO8L63G[V)3I$BYDF]A`T`A.png](data/attachment/forum/202205/24/110627b0v2aul2pee4wtuh.png "WO8L63G[V)3I$BYDF]A`T`A.png")
4、总结 以上就PWM控制电机转速与编码器读取电机速度的HAL库配置与keil编程,后续会推出利用PID算法闭环控制电机转速(HAL库) |
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版