前言
串口通讯对于任何开发板都是非常重要的,也是必学知识之一,通过串口通信可以实现上位机与下位机之间、开发板之间的通讯,可以让我们实时掌握机器人的各个关机的运动状态和传感器的信息。
现在的通信协议有很多,比如:UART、USART、CAN、SPI等等,它们功能不同,适用于不同的场合,USART作为单片机之间、下位机与上位机之间最常用的通讯方式之一,它对于数据的收发十分方便,应用日益广泛。
一、USART通信原理
USART(Universal Synchronous/Asynchronous Receiver/Transmitter)中文名叫:全双工通用同步/异步串行收发模块。
先对这个名字的各个部分进行解释:

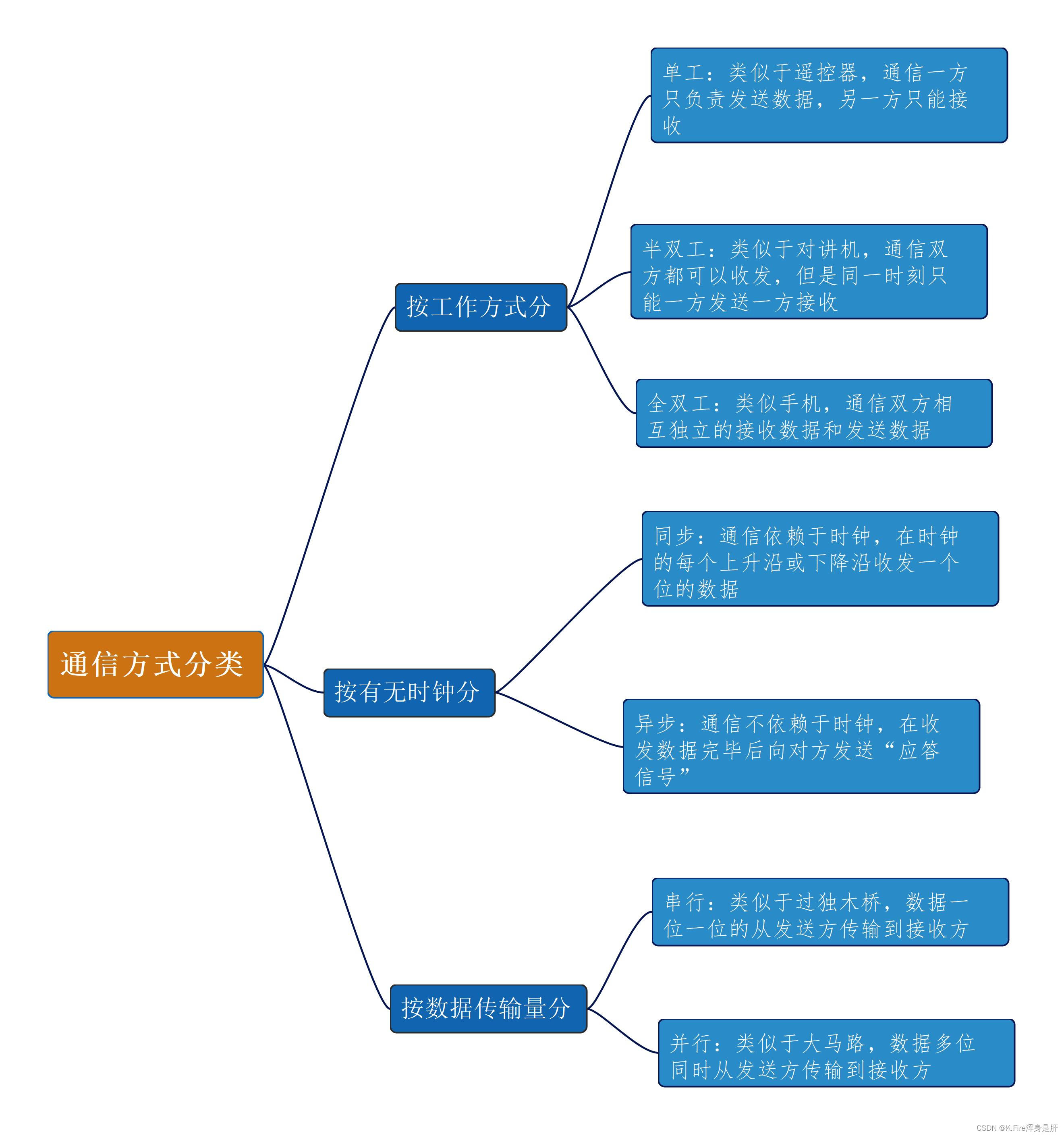
在平时的工程项目中,我们常用的是全双工串行异步通信方式,虽然串行通信数据是一位一位的发送,但随着近几年科技的高速发展,串行通讯的速度已经逐渐赶超并行通讯了,而且串行通讯方式适用于远距离通讯,比较常用。
USART通讯的数据格式大致是这样:
起始位(0)+串行数据帧(从低位到高位传输)+停止位(1)
串行数据帧可以人为设置为8位或者9位,9位是8位数据加上1位校验位(奇偶校验)。
另外一个比较重要的概念是波特率,在任何通讯开始之前,通讯双方都要约定好波特率,波特率是每秒发送有效数据的位数(bit/s),双方如果没有约定好一致的波特率,在传输过程中则会出现乱码的情况。
在STM32中,有专门的数据寄存器和特定的引脚负责USART通讯,并配合有相应的标志位,用于帮我们判断数据是否发送/接收完毕,并且也有相关的库函数帮助我们对串口进行配置。
相关寄存器有:发送数据寄存器(TDR)、发送移位寄存器、接收数据寄存器(RDR)、接受移位寄存器。
相关标志位有:
TEX标志位:1:数据寄存器无数据;0:数据寄存器有数据
TX标志位:1:发送完成;0:发送未完成
RXNE标志位:1:数据接收完成,可以读出;0:数据未收到
具体知识在中文参考手册P517,大家可以详细查看
二、STM32与PC通讯
STM32与PC通讯需要进行一些配置,这里实现由PC端向STM32发送一个数据,STM32接收到后再发回到PC端,该实验需要用到串口调试助手。
STM32可以作为串口通讯的引脚大家可以通过数据手册进行查看,比如PA9(TX)和PA10(RX)
![94]6SASVE]E8VUPMKX_YD40.png](data/attachment/forum/202204/26/222630dvtppo7rsta9es8e.png "94]6SASVE]E8VUPMKX_YD40.png")
串口通讯一般都配合中断进行使用,下面讲解串口配置过程:
USART配置步骤
步骤 函数 1.串口时钟、GPIO时钟使能 RCC_APB2PeriphClockCmd 2.GPIO端口模式配置 GPIO_Init 3.串口参数初始化 USART_Init 4.开启终端并初始化NVIC USART_ITConfig、NVIC_Init 5.使能串口 USART_Cmd 6.编写中断服务函数 USART1_IRQHandler
my_usart.c 代码如下:
- void My_Usart1_Init(int bound)
- {
- /*1.串口时钟、GPIOA使能*/
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA,ENABLE);
-
-
- /*2.GPIO端口模式设置*/
- GPIO_InitTypeDef GPIO_InitStruct;
- /*TX*/
- GPIO_InitStruct.GPIO_Pin = Usart1_TX;
- GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStruct);
- /*RX*/
- GPIO_InitStruct.GPIO_Pin = Usart1_RX;
- GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- //GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStruct);
-
-
- /*3.串口参数初始化*/
- USART_InitTypeDef USART_InitStruct;
- USART_InitStruct.USART_BaudRate = bound;//波特率
- USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件流控制
- USART_InitStruct.USART_Mode = USART_Mode_Rx|USART_Mode_Tx;//USART模式
- USART_InitStruct.USART_Parity = USART_Parity_No;//校验位
- USART_InitStruct.USART_StopBits = USART_StopBits_1;//终止位
- USART_InitStruct.USART_WordLength = USART_WordLength_8b;//数据长度,如果有奇偶校验就设置为9位
- USART_Init(USART1, &USART_InitStruct);
-
- /*4.开启中断并初始化NVIC*/
- USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开中断,开启接受中断后,接收到数据则会进入中断服务函数
-
- NVIC_InitTypeDef NVIC_InitStruct;
- NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;
- NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
- NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 3;
- NVIC_InitStruct.NVIC_IRQChannelSubPriority = 3;
- NVIC_Init(&NVIC_InitStruct);//初始化NVIC
-
- /*5.使能串口*/
- USART_Cmd(USART1, ENABLE);
-
- /*6.编写中断服务函数*/
-
- }
进行如上配置后,当STM32接收到PC发送的信息就会进入中断服务函数,中断服务函数接收到数据后再进行发送。
中断服务函数代码:
- void USART1_IRQHandler(void)
- {
- u16 RX_From_PC;
- if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET)
- {
- USART_ClearITPendingBit(USART1,USART_IT_RXNE);//清空中断标志位
- RX_From_PC = USART_ReceiveByte(USART1);//接收PC端发来的消息
- USART_SendByte(USART1,RX_From_PC);//将数据发回到PC端
-
- //usartReceiveOneData(&TargetVelocity,&TargetVelocity,&RX_Cmd_Form_Ros);//接收ROS发来的消息
- }
- }
在这里我们没有使用官方固件库中提供的收发函数 USART_ReceiveData 和 USART_SendData,而是使用了我自己对他们进行重写的函数,在其中加入了相关标志位的判断,这样可以保证收发过程中不会发生数据覆盖。
重写后的函数:
- void USART_SendByte(USART_TypeDef* USARTx, uint16_t Data)
- {
- /* Check the parameters */
- assert_param(IS_USART_ALL_PERIPH(USARTx));
- assert_param(IS_USART_DATA(Data));
- /* Transmit Data */
- USARTx->DR = (Data & (uint16_t)0x01FF);
- while(USART_GetFlagStatus(USARTx,USART_FLAG_TXE)==RESET);
- }
- void USART_SendString(USART_TypeDef* USARTx,char* str)
- {
- while((*str) != '\0')
- {
- USART_SendByte(USARTx, *str);
- str++;
- }
- while(USART_GetFlagStatus(USARTx,USART_FLAG_TC)==RESET);
- }
- uint16_t USART_ReceiveByte(USART_TypeDef* USARTx)
- {
- /* Check the parameters */
- assert_param(IS_USART_ALL_PERIPH(USARTx));
-
- while(USART_GetFlagStatus(USARTx,USART_FLAG_RXNE)==RESET);
- /* Receive Data */
- return (uint16_t)(USARTx->DR & (uint16_t)0x01FF);
- }
在主函数中进行相应的初始化,我们就可以通过串口助手与STM32进行通讯了。
![{[]G6A`}0`ZOOK8XC_%)6S9.png](data/attachment/forum/202204/26/222630p6xf46qqxzqhy4er.png "{[]G6A`}0`ZOOK8XC_%)6S9.png")
另外,Keil5是没有终端的,但我们可以通过一些设置也使用printf函数,让数据收发更加方便,我们需要对fputs和fgets这两个函数进行重定向(其实只重定向fputs即可),需要在程序中加入如下代码:
- /*重定向这两个函数*/
- int fputc(int ch,FILE *f)
- {
- while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);
- USART_SendData(USART1,(uint8_t) ch);
- return ch;
- }
- int fgetc(FILE *f)
- {
- while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) == RESET);
- return (int)USART_ReceiveData(USART1);
- }
printf函数使用的是半主机工作模式,需要使用微控制器,需要进行如下配置:
![{3{FUBC9AU]ED(F8UYKCYID.png](data/attachment/forum/202204/26/222631eh5vfjd44ntzdp4x.png "{3{FUBC9AU]ED(F8UYKCYID.png")
这玩意功能少一些,如果不想用,则需要在程序中再加入以下代码,这是printf函数的底层程序:
- #pragma import(__use_no_semihosting)
- struct __FILE
- {
- int handle;
- };
- FILE __stdout;
- _sys_exit(int x)
- {
- x = x;
- }
编译后,我们就可以与PC端进行愉快的通讯了。
三、STM32与HC-06通讯
STM32与HC-06的通讯与PC端的通讯类似,知识接线方式的不同而已,只需要进行如下正确的接线,即可完成顺利地通讯。

这里要注意的是,给HC-06供电时,需要提供3.6V-6V的电压;另外,要注意看一下STM32的引脚输出电压是多少,HC-06的输入输出电压都是3.3V,比如像Arduino的输出电压为5V,这时单片机的TX在接HC-06的RX时需要分压!
四、STM32与ROS通讯
STM32与ROS通讯时,需要定义一个协议,以保证数据传输的可靠性,这个协议是STM32与ROS通讯时最广泛使用的协议,协议格式如下:
数据头55aa + 控制命令 + 数据字节数size + 数据 + 校验crc8 + 数据尾0d0a
在通讯时,我们只要对接收到的信息进行解码,即可获得有效数据信息,比如:设定的速度值、航向角等,保证了数据收发的可靠性。
先定义相关的变量:
- //数据接收暂存区
- unsigned char receiveBuff[Message_Length-4] = {0};
- //通信协议常量
- const unsigned char header[2] = {0x55, 0xaa};
- const unsigned char ender[2] = {0x0d, 0x0a};
- //发送数据(左轮速、右轮速、角度)共用体(-32767 - +32768)
- union sendData
- {
- float d;
- char data[4];
- }leftVelNow,rightVelNow,angleNow;
- //左右轮速控制速度共用体
- union receiveData
- {
- float d;
- char data[4];
- }leftVelSet,rightVelSet;
接收信息函数:
发送信息函数:
- void usartSendData(float leftVel, float rightVel,float angle,unsigned char ctrlFlag)
- {
- // 协议数据缓存数组
- unsigned char buf[Message_Length] = {0};
- int i, length = 0;
- // 计算左右轮期望速度
- leftVelNow.d = leftVel;
- rightVelNow.d = rightVel;
- angleNow.d = angle;
-
- // 设置消息头
- for(i = 0; i < 2; i++)
- buf<i> = header<i>; // buf[0] buf[1]
- //设置命令位
- buf[2] = ctrlFlag; // buf[2]
-
- //设置数据长度
- length = 3 * sizeof(float);
- buf[3] = length; // buf[3]
-
- // 设置机器人左右轮速度、角度
- for(i = 0; i < 4; i++)
- {
- buf[i + 4] = leftVelNow.data<i>; // buf[4] buf[5] buf[6] buf[7]
- buf[i + 8] = rightVelNow.data<i>; // buf[8] buf[9] buf[10] buf[11]
- buf[i + 12] = angleNow.data<i>; // buf[12] buf[13] buf[14] buf[15]
- }
-
- // 设置校验值、消息尾
- buf[Message_Length - 3] = getCrc8(buf, 4 + length); // buf[16]
- buf[Message_Length - 2] = ender[0]; // buf[17]
- buf[Message_Length - 1] = ender[1]; // buf[18]
-
- //发送字符串数据
- USART_Send_String(buf,sizeof(buf));
- }
- 循环冗余校验:
- unsigned char getCrc8(unsigned char *ptr, unsigned short len)
- {
- unsigned char crc;
- unsigned char i;
- crc = 0;
- while(len--)
- {
- crc ^= *ptr++;
- for(i = 0; i < 8; i++)
- {
- if(crc&0x01)
- crc=(crc>>1)^0x8C;
- else
- crc >>= 1;
- }
- }
- return crc;
- }</i></i></i></i></i>
然后我们只要在中断服务函数中调用收发信息函数,即可实现与ROS的通讯。
总结
串口通讯的ROS部分,使用到了boost::asio库,等我学会了再更。
|
.png) STMCU小助手
发布时间:2022-4-26 22:26
STMCU小助手
发布时间:2022-4-26 22:26
 微信公众号
微信公众号
 手机版
手机版