.png) STMCU小助手
发布时间:2022-5-21 19:00
STMCU小助手
发布时间:2022-5-21 19:00
|
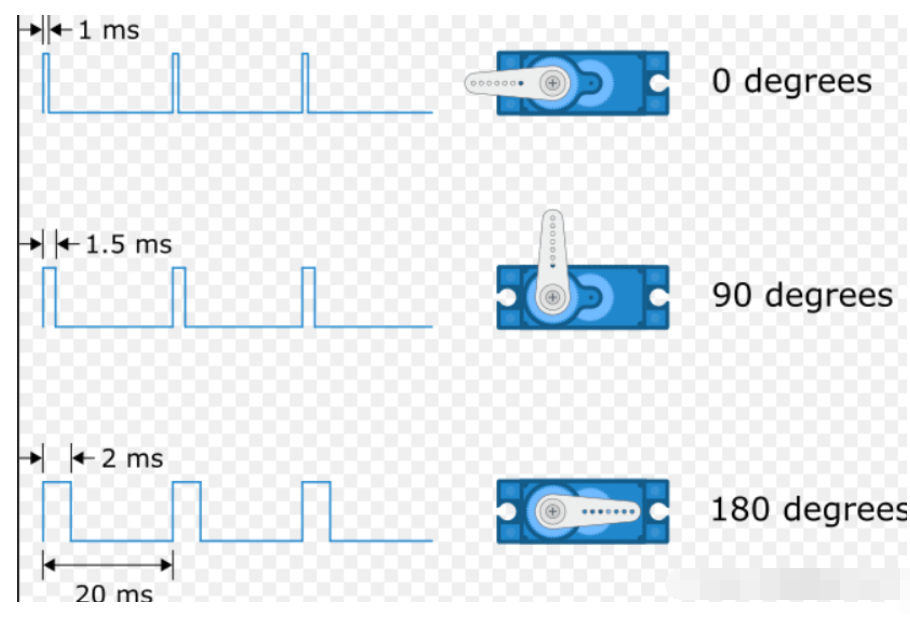
前言 本文将带大家学习如何驱动舵机转向以及控制转向的角度值。 一、舵机简单介绍及接线方式 信号线(黄线)红线(电源线)棕色(地线) 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 
二、cubeMX配置 前面我们说过舵机的控制一般需要一个20ms左右的时基脉冲,所以我们要将舵机的PWM的频率设置为50HZ。 电机的驱动引角接到了PA8所以将cuebMX配置如下: ![Q~W@~AL(L]DG(ZLQG`U`N(L.png](data/attachment/forum/202205/20/193652fnjl7n3n2fz7pqpa.png "Q~W@~AL(L]DG(ZLQG`U`N(L.png")
三、代码解析 SG90.c
总结 本文简单介绍了舵机的使用方法,希望大家下去好好理解消化。 |
【经验分享】STM32 HAL库移植FreeModbus详细步骤
【逢7发帖赢大礼】STM32开发之IC门禁卡UID读取方法!
实战经验 | Keil工程使用NEAI库的异常问题
经验分享 | FDCAN数据段波特率增加后发送失败的问题分析
STM32几种流行开发环境的优缺点
好用软件推荐-TouchGFX Designer
OpenSTLinux 6.1发布:M33-TD加持+安全升级,STM32MPU开发效率翻倍!
【经验分享】STM32CubeIDE汉化
手把手教你VSCode搭建STM32开发环境
RTOS在STM32中的应用
 微信公众号
微信公众号
 手机版
手机版