.png) STMCU小助手
发布时间:2022-5-8 18:00
STMCU小助手
发布时间:2022-5-8 18:00
|
前言 SPI 是Serial Peripheral interface 的缩写,顾名思义就是串行外围设备接口。是 Motorola 首先在其 MC68HCXX 系列处理器上定义的。SPI 接口主要应用在 EEPROM,FLASH,实时时 钟,AD 转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工, 同步的通信总线。 本文参考正点原子SPI实验,使用STM32自带SPI来实现对外部FLASH(W25Q64)的读写。 SPI 接口一般使用 4 条线通信: MISO 主设备数据输入,从设备数据输出。 MOSI 主设备数据输出,从设备数据输入。 SCLK 时钟信号,由主设备产生。 CS 从设备片选信号,由主设备控制。 
![]2B$~LHRVY8WU{~_OZ)9EXR.png](data/attachment/forum/202205/07/185935c838pvzwkhciiitv.png "]2B$~LHRVY8WU{~_OZ)9EXR.png")
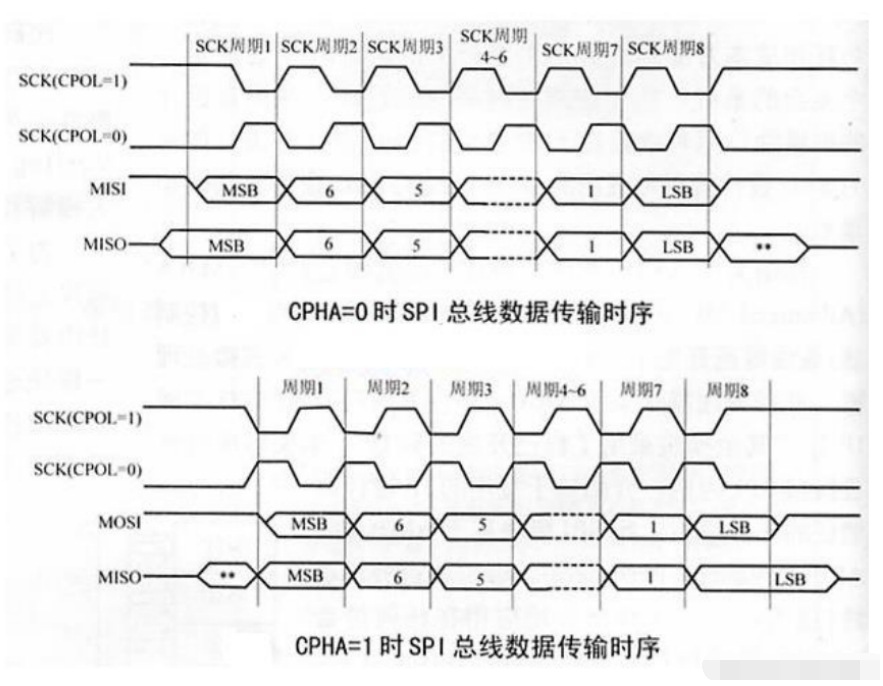
SPI 时钟最多可以到 18Mhz,支持 DMA,可以配置为 SPI 协议或者 I2S 协议(仅大容量型号支持)。 特点 可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。 配置步骤 SPI 相关的库函数和定义分布在文件 stm32f10x_spi.c 以及头文件 stm32f10x_spi.h 中 1)配置相关引脚的复用功能,使能 SPI1 时钟 第一步使能SPI1时钟,SPI1 的时钟通过 APB2ENR 的第 12 位来设置。设置 SPI1 的相关引脚为复用输出,这样才会连接到 SPI1 上否则这些 IO 口还是默认的状态,也就是标准输入输出口。 2)初始化 SPI1,设置 SPI1 工作模式 设置 SPI1 为主机模式,设置数据格式为 8 位,然设置 SCK 时钟极性及采样方式。并设置 SPI1 的时钟频率(最大 18Mhz),以及数据的格式(MSB 在前还是LSB 在前)。 void SPI_Init(SPI_TypeDef* SPIx, SPI_InitTypeDef* SPI_InitStruct); 3)使能 SPI1 SPI_Cmd(SPI1, ENABLE); //使能 SPI 外设 4)SPI 传输数据 void SPI_I2S_SendData(SPI_TypeDef* SPIx, uint16_t Data); 5)查看 SPI 传输状态 SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE); SPI特征 ● 3线全双工同步传输 ● 带或不带第三根双向数据线的双线单工同步传输 ● 8或16位传输帧格式选择 ● 主或从操作 ● 支持多主模式 ● 8个主模式波特率预分频系数(最大为fPCLK/2) ● 从模式频率 (最大为fPCLK/2) ● 主模式和从模式的快速通信 ● 主模式和从模式下均可以由软件或硬件进行NSS管理:主/从操作模式的动态改变 ● 可编程的时钟极性和相位 ● 可编程的数据顺序,MSB在前或LSB在前 ● 可触发中断的专用发送和接收标志 ● SPI总线忙状态标志 ● 支持可靠通信的硬件CRC ─ 在发送模式下,CRC值可以被作为最后一个字节发送SPI接口 ─ 在全双工模式中对接收到的最后一个字节自动进行CRC校验 ● 可触发中断的主模式故障、过载以及CRC错误标志 ● 支持DMA功能的1字节发送和接收缓冲器:产生发送和接受请求 I2S功能 ● 单工通信(仅发送或接收) ● 主或者从操作 ● 8位线性可编程预分频器,获得精确的音频采样频率(8KHz到96kHz) ● 数据格式可以是16位,24位或者32位 ● 音频信道固定数据包帧为16位(16位数据帧)或32位(16、24或32位数据帧) ● 可编程的时钟极性(稳定态) ● 从发送模式下的下溢标志位和主/从接收模式下的溢出标志位 ● 16位数据寄存器用来发送和接收,在通道两端各有一个寄存器 ● 支持的I2S协议: ─ I2S飞利浦标准 ─ MSB对齐标准(左对齐) ─ LSB对齐标准(右对齐) ─ PCM标准(16位通道帧上带长或短帧同步或者16位数据帧扩展为32位通道帧) ● 数据方向总是MSB在先 ● 发送和接收都具有DMA能力 ● 主时钟可以输出到外部音频设备,比率固定为256xFs(Fs为音频采样频率) ● 在互联型产品中,两个I2S模块(I2S2和I2S3)有一个专用的PLL(PLL3),产生更加精准得时钟 S(UW(6Z}3T(}Y([OGP.png")
|
基于stm32平台上的IC-MU磁绝对值编码器SPI通讯和码盘数据处理
SPI 32位宽DMA方式收发失败问题
SPI 高温读错最后一位?STM32F42xx 官方根治方案
经验分享 | LAT1470 SPI传输长度超过1024时出现异常的问题分析
经验分享 | 使用EXIT0同步触发SPI的DMA发送话题
经验分享 | STM32H723 SPI 通讯异常排查:实时观察窗口的 “隐形干扰” 解决方案
【STM32C0评测】4、驱动Lorasx126x,实现透传
经验分享 | STM32 SPI半工单线通信示例
经验分享 | 多个SPI的DMA传输为何仅1个有效?
经验分享 | STM32C0 HAL 库的 SPI 驱动导致的 Hardfault 问题分析
 微信公众号
微信公众号
 手机版
手机版