|
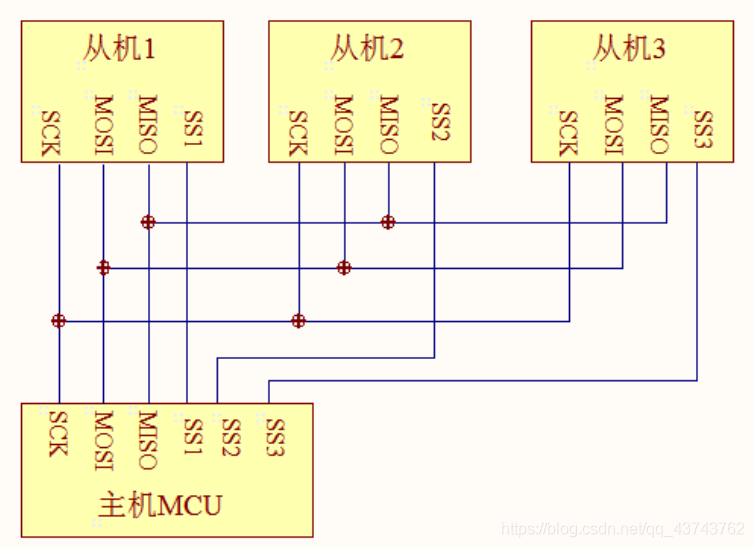
一.什么是SPI SPI是串行外设接口(Serial Peripheral Interface)的缩写,SPI是一种高速、全双工、同步通信的通信总线,被广泛应用在ADC、LCD等与MCU的通信过程中,特点就是快。 二.SPI协议 就像IIC、串口一样,SPI也有其通信协议,我们一般按照分层的思想来学习SPI的协议,主要分为物理层和协议层。 物理层 首先看一下SPI通信设备之间的常用连接方式,主机和从机之间通过三条总线和片选线组成: 
NSS:片选设备线,每个从机都有自己的一条单独的总线与主机连接,此总线的作用就是为主机选择对应的从机进行传输数据,每个从机与主机之间的NSS总线互不相干。SPI中规定通信以NSS信号线拉低为开始,拉高为结束。 SCK:时钟信号线,因为SPI是同步通信,所以需要一根时钟信号线来统一主机和从机之间的数据传输,只有在有效的时钟信号下才能正常传输数据,不同设备支持的最高传输频率可能不一样,在传输过程中传输频率受限于低速的一方。 MOSI:(Master Output, Slave Input),顾名思义,MOSI就是主机输出/从机输入,因为SPI是全双工的通信总线,即主机和从机可以同时收发数据,这样的话就需要俩条线同时分别负责:主->从和从->主这俩条传输线路。而MOSI就专门负责主机向从机传输数据。 MISO:(Master Input,, Slave Output),与MOSI恰恰相反,MISO专门负责从机向主机传输数据。 协议层 和IIC一样,SPI协议层规定了传输过程中的起始信号和停止信号、数据有效性、时钟同步、通讯模式,接下来依据通讯时序图来剖析协议层的内容。 1.通讯时序图 如图所示是SPI的一种通信模式下的时序图: 
所有的运作都是基于SCK时钟线的,SCK对于SPI的作用就像心脏对于人体的作用,SCK为低电平就代表心脏停止跳动。 2.起始和停止信号 前面物理层说过,SPI通讯的起始和停止由NSS信号线控制,当NSS为低电平时代表起始信号,当NSS为高电平时代表停止信号。时序图中1和6部分代表起始信号和停止信号。 3.数据有效性 SPI中使用MOSI和MISO来进行全双工传输数据,SCK来同步数据传输,即MOSI和MISO同时工作,在时钟信号线SCK为有效时对MOSI、MISO数据线进行采样,采到的信息即为传输的信息。IIC中通讯中的数据是在SCL总线为高电平时对数据采样,SPI中数据的采样是在SCK的上升沿或下降沿时进行的。图示模式中3和5部分就是对数据进行采样的时刻,可以看出图示中数据是在SCK的下降沿进行采样的。MOSI和MISO的高低电平代表了1和0。 4.通讯模式 SPI有四种通讯模式,他们的主要依靠总线空闲时SCK的时钟状态和数据采样时刻来区别。这里就涉及到时钟极性CPOL和时钟相位CPHA的知识。 时钟极性CPOL:CPOL是指NSS总线空闲时SCK的电平信号,如果SCK为高电平,CPOL=1;SCK为低电平,CPOL=0。下面的这种情况CPOL=0. 
时钟相位CPHA:CPHA是指数据的采样时刻,SCK的信号可以看作方波,CPHA=0时会在SCK的奇数边沿采样;CPHA=1时会在SCK的偶数边沿采样。 如图:NSS空闲时SCK为低电平,而且在SCk的下降沿(也就是第二个边沿)采样,所以这种通讯模式下CPOL=0,CPHA=1. 
四种通讯模式:所以,根据CPOL和CPHA的搭配可以得出四种不同的通讯模式,如下: 
三.STM32中的SPI 简介 STM32中集成了专门用于SPI通讯的外设。支持最高的 SCK 时钟频率为 fpclk/2 (STM32F103 型号的芯片默认 fpclk1为 72MHz, fpclk2为 36MHz),完全支持 SPI 协议的 4 种模式,数据帧长度可设置为 8 位或 16 位,可设置数据 MSB 先行或 LSB 先行。它还支持双线全双工、双线单向以及单线模式。其中双线单向模式可以同时使用 MOSI 及 MISO 数据线向一个方向传输数据,可以加快一倍的传输速度。而单线模式则可以减少硬件接线,当然这样速率会受到影响。 功能框图 
STM32中SPI外设的功能框图可以大体分为四部分,对应的1、2、3、4分别是:通讯引脚、时钟控制逻辑、数据控制逻辑、整体控制逻辑,下面进行一一分析。 1.通讯引脚 STM32中有多个SPI外设,这些SPI的MOSI、MISO、SCK、NSS都有对应的引脚,在使用相应的SPI时必须配置这些对应的引脚,STM32中的三个SPI外设的引脚分布情况如下: 
根据他们的引脚分布知道SPI1是挂载在APB2总线上的,SPI2和SPI3挂载在APB1总线上,这挂载在不同的总线上的主要区别就是,APB1和APB2总线的时钟频率不同,导致三个SPI的通讯速率收到总线时钟频率的影响。而且SPI3的引脚的默认功能是下载,如果要使用SPI3,必须禁用这几个口的下载功能。 2.时钟控制逻辑 这一块的内容主要是配置SCK的时钟频率和SPI的通讯模式(CPOL和CPHA)。 时钟频率的配置: 波特率发生器通过控制“控制寄存器CR1”中的BR[2:0]三个位来配置fpclk的分频因子,对fpclk分频后的频率就是SCK的时钟频率,具体配置如下图所示: (PS:fpclk为对应SPI挂载总线的时钟频率) 通讯模式的配置: 通过配置“控制寄存器CR”中的CPOL位和CPHA位将通讯模式配置为上文所说的四种模式之一。 3.数据控制逻辑 这部分主要控制数据的接收和发送以及数据帧格式和MSB/LSB先行,和串口通讯类似,SPI的收发数据也是通过缓冲区和移位寄存器来实现的。MOSI和MISO都与移位寄存器相连以便传输数据,下面具体说明一下主机发送数据和接收数据的流程。当发送完一帧数据的时候,“状态寄存器 SR”中的“TXE 标志位”会被置 1,表 示传输完一帧,发送缓冲区已空;类似地,当接收完一帧数据的时候,“ RXNE 标志位”会被置 1,表示传输完一帧,接收缓冲区非空; 发送数据: 地址和数据总线会在相应的地址上取到要发送的数据,将数据放入发送缓冲区,当向外发送数据时,移位寄存器会以发送缓冲区为数据源,一位一位的将数据发送出去。 接收数据: 接收数据时,移位寄存器把数据线采样到的数据一位一位的传到接收缓冲区,再由总线读取接收缓冲区中的数据。 数据帧格式: 通过配置“控制寄存器CR1”的“DFF为”可以控制数据帧格式为8位还是16位,即一次接收或发送数据的大小。 先行位: 通过配置“控制寄存器CR1”的“LSBFIRST 位”可选择 MSB(最高有效位) 先行还是 LSB(最低有效位) 先行。 4.整体逻辑控制 在外设工作时,控制逻辑会根据外设的工作状态修改“状态寄存器(SR)”,我们只要读取状态寄存器相关的寄存器位,就可以了解 SPI 的工作状态了。除此之外,控制逻辑还根据要求,负责控制产生 SPI 中断信号、DMA 请求及控制NSS 信号线,不过NSS信号线我们时一般是连接GPIO口,通过软件来控制电平输出,从而产生起始信号和停止信号。 初始化结构体 库函数编程中几乎每一个外设的灵魂部分就是其初始化结构体了,初始化结构体中包含了外设运作的状态、工作模式、对象等重要信息,配置好初始化结构体后,通过初始化函数将初始化结构体中的信息写入相应的寄存器中。SPI外设的初始化结构体如下:
这些结构体成员说明如下,其中括号内的文字是对应参数在 STM32 标准库中定义的宏: (1) SPI_Direction 本成员设置 SPI 的通讯方向,可设置为双线全双工(SPI_Direction_2Lines_FullDuplex),双线只接(SPI_Direction_2Lines_RxOnly),单线只接收(SPI_Direction_1Line_Rx)、单线只发送模(SPI_Direction_1Line_Tx)。 (2) SPI_Mode 本成员设置 SPI 工作在主机模式(SPI_Mode_Master)或从机模式(SPI_Mode_Slave ),这两个模式的最大区别为 SPI 的 SCK 信号线的时序, SCK 的时序是由通讯中的主机产生的。若被配置为从机模式, STM32 的 SPI 外设将接受外来的 SCK 信号。 (3) SPI_DataSize 本成员可以选择 SPI 通讯的数据帧大小是为 8 位(SPI_DataSize_8b)还是 16 位 (SPI_DataSize_16b)。 (4) SPI_CPOL 和 SPI_CPHA 这两个成员配置 SPI 的时钟极性 CPOL 和时钟相位 CPHA,这两个配置影响到 SPI 的通讯模式,时钟极性 CPOL 成员,可设置为高电平(SPI_CPOL_High)或低电平(SPI_CPOL_Low )。时钟相位 CPHA 则可以设置为 SPI_CPHA_1Edge(在 SCK 的奇数边沿采集数据) 或SPI_CPHA_2Edge (在 SCK 的偶数边沿采集数据) 。 (5) SPI_NSS 本成员配置 NSS 引脚的使用模式,可以选择为硬件模式(SPI_NSS_Hard )与软件模式(SPI_NSS_Soft ),在硬件模式中的 SPI 片选信号由 SPI 硬件自动产生,而软件模式则需要我们亲自把相应的 GPIO 端口拉高或置低产生非片选和片选信号。实际中软件模式应用比较多。 (6) SPI_BaudRatePrescaler 本成员设置波特率分频因子,分频后的时钟即为 SPI 的 SCK 信号线的时钟频率。这个成员参数可设置为 fpclk 的 2、 4、 6、 8、 16、 32、 64、 128、 256 分频。 (7) SPI_FirstBit 所有串行的通讯协议都会有 MSB 先行(高位数据在前)还是 LSB 先行(低位数据在前)的问题,而 STM32 的 SPI 模块可以通过这个结构体成员,对这个特性编程控制。 (8) SPI_CRCPolynomial 这是 SPI 的 CRC 校验中的多项式,若我们使用 CRC 校验时,就使用这个成员的参数(多项式),来计算 CRC 的值。 初始配置函数
这段代码中,把 STM32 的== SPI 外设配置为主机端,双线全双工模式,数据帧长度为 8位,使用 SPI 模式 3(CPOL=1, CPHA=1), NSS 引脚由软件控制以及 MSB 先行模式。 代码中把 SPI 的时钟频率配置成了 4 分频==。 最后一个成员为 CRC 计算式,由于我们不需要 CRC 校验,并没有使能 SPI 的 CRC 功能,这时 CRC 计算式的成员值是无效的。赋值结束后调用库函数 SPI_Init 把这些配置写入寄存器,并调用 SPI_Cmd 数使能外设。 发送、接收一个字节
发送数据前要等待发送缓冲区为空,靠TXE标志判断,所以开始的while循环是等待发送缓冲区为空,同时,等待接收缓冲区是否有数据,靠RXNE标志来判断,把接收缓冲区的数据作为返回值返回。由于发送和接收是同时进行的,而且要接收一个数据时必须在有效的SCK下,而只有发送数据才能产生有效的SCK,所以接收数据的函数时在发送数据的函数的基础上,将发送的数据设置为Dummy_Byte假数据来骗取有效的SCK。 头文件
———————————————— 版权声明:Aspirant-GQ 如有侵权请联系删除 |

基于stm32平台上的IC-MU磁绝对值编码器SPI通讯和码盘数据处理
SPI 32位宽DMA方式收发失败问题
SPI 高温读错最后一位?STM32F42xx 官方根治方案
经验分享 | LAT1470 SPI传输长度超过1024时出现异常的问题分析
经验分享 | 使用EXIT0同步触发SPI的DMA发送话题
经验分享 | STM32H723 SPI 通讯异常排查:实时观察窗口的 “隐形干扰” 解决方案
【STM32C0评测】4、驱动Lorasx126x,实现透传
经验分享 | STM32 SPI半工单线通信示例
经验分享 | 多个SPI的DMA传输为何仅1个有效?
经验分享 | STM32C0 HAL 库的 SPI 驱动导致的 Hardfault 问题分析
 微信公众号
微信公众号
 手机版
手机版